


脉冲重复频率(PRF)为何那么重要?


对于PD雷达,没有什么参数比脉冲重复频率更为重要,PRF决定了距离和多普勒频率的模糊程度,而模糊程度不仅决定了雷达的测距和测速性能,还决定了抑制地面杂波的能力。
1 PRF与模糊的关系
距离模糊和多普勒频率模糊在前面的文章中都已经有详细的介绍,本小节再次从PRF的角度对两种模糊进行总结。
距离模糊
在前面的内容中已经得知,探测距离一旦超过最大不模糊距离 R_{u} 就会发生距离模糊。从 R_{u}=\frac{c}{2f_{r}} 公式中容易得知,如果PRF足够低的话, R_{u} 就能实现足够高,使得最大作用距离落在一次距离区内。PRF与距离模糊的关系用下图表示:
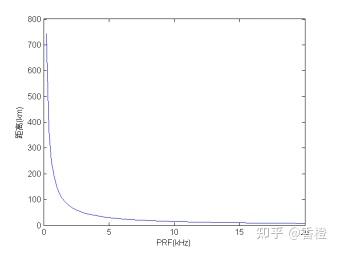
可以看到随着PRF的增大,最大不模糊距离迅速下降 。
多普勒频率模糊
普勒频率模糊不仅与PRF有关,还取决于波长和目标相对于雷达的运动速度,这从多普勒频率的公式上就能理解。从杂波抑制的角度来看,目标的最高不模糊多普勒频率指的是目标不必跟边带多普勒频率的杂波相竞争的最高频率,这从下图看得比较清晰:
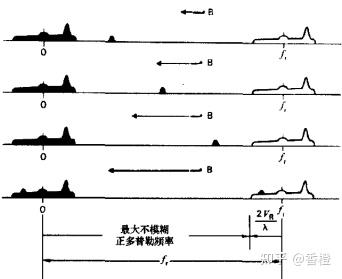
因此最大不模糊多普勒频率表示为: f_{u}=f_{r}-\frac{2v_{r}}{\lambda} 。从该式可以看出: 在相同的PRF下,波长越短,最大不模糊多普勒频率就越小,意味着多普勒频率不模糊区域受到的限制就越多 。在载机速度为1000节(1节=1.852km/h=0.51m/s)条件下,对比波长为3cm和1cm时PRF和多普勒频率模糊的关系图:
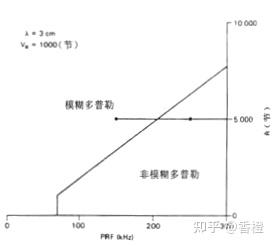
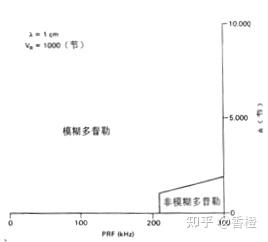
可以看到随着波长变短,不模糊多普勒频率区急剧减小。
同时考虑两种模糊
简单来说,PRF低对避免距离模糊是有利的,但是易导致多普勒频率模糊;而PRF足够高虽然能避免多普勒频率模糊,但是易导致距离模糊。在波长为3cm、载机速度为1000节条件下,画出PRF与两种模糊的关系图:
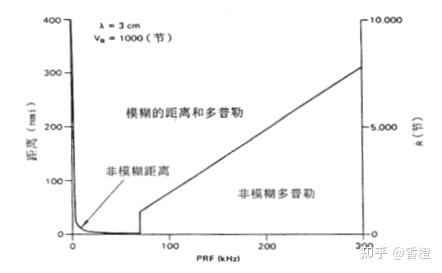

可以看到不模糊距离区很窄,不模糊多普勒频率区相当宽。两个不模糊区的中间,是一个相当大的距离和多普勒频率同时模糊的区域。 因此, PRF的选择是需要折衷考虑的 。
2 三种PRF工作模式
PRF划分为三种类型:低PRF、中PRF和高PRF。需要注意的是,划分并不是根据PRF本身的数值大小定义的,而是根据该PRF是否使观测距离和观测多普勒频率模糊而定义的。通常是这么定义的:
低PRF:雷达最大作用距离设计在一次距离区内的PRF。
高PRF:对所有感兴趣目标的观测多普勒频率均不模糊的PRF。
中PRF:上述条件均不满足时的PRF,即距离和多普勒频率都是模糊的。
所以对于某一数值的PRF,属于哪种类型还得视情况而定。举个简单的例子:4kHz的PRF,经计算最大不模糊距离为20海里,如果感兴趣的最大距离小于20海里,那么该PRF就是低PRF,如果大于20海里,那么该PRF就是中PRF(甚至是高PRF)。
低PRF工作模式
此工作模式下距离不会模糊,存在两个优点:一是距离可直接用简单的精确脉冲延时测距测得;二是所有的旁瓣回波都可通过距离选通进行抑制。
但是如果主瓣杂波与目标在距离上分不开,则需要根据多普勒频率的差别对主瓣杂波进行抑制。因为低PRF时主瓣杂波谱宽占据了PRF的相当一部分,抑制主瓣杂波必然也抑制掉了位于主瓣杂波内的目标。使主瓣杂波谱宽变窄的方法有:波长足够长;载机速度足够低;天线足够大(主瓣宽度变窄)。但对大多数机载火控雷达(波长短、天线小、速度高),PRF低到使多普勒频谱被压缩到一定程度,主瓣杂波占据了多普勒频带的绝大部分。雷达不仅不能分辨多普勒模糊,而且雷达还易于受到地面动目标的干扰(地面目标和飞机目标无法直接区分)。
所以低PRF的使用主要限于主瓣杂波可以避免的场合:在水面上空飞行时的场合,其具有相对低的后向散射系数;以较高海拔高度仰视搜索目标时;当主瓣照射到超过感兴趣的最大距离外的地面,并且一次距离区以外的杂波被非多普勒分辨方法抑制时。
对于地图测绘雷达,低PRF是理想的,因为此时主瓣的地面反射波是唯一感兴趣的反射波,因为主瓣反射波的强度占压倒性是一个优点而不是缺点。此外,低PRF所提供的不模糊距离观测是很重要的。
对于SAR用于地图测绘时,不模糊的多普勒频率观测(注意此处对象为杂波)也是很重要的,即保证主瓣杂波频谱不重叠,同时又保证距离不模糊。
| 序号 | 优点 | 缺点 |
|---|---|---|
| 1 | 空-空仰视和地图测绘性能好 | 空-空俯视性能不好,大部分目标回波可能和主瓣杂波一起被抑制掉(从频域角度看) |
| 2 | 测距精度高,距离分辨率高 | 地面动目标会出现在频域全范围内,抑制可能是一个问题,进一步恶化陆上下视的性能(从频域角度看) |
| 3 | 可采用简单的脉冲延时测距 | 多普勒模糊很严重,难以解决 |
| 4 | 可通过距离分辨抑制一般的旁瓣回波(从距离域角度看) |
高PRF工作模式
作于高PRF时,主瓣杂波不会显著地侵占可能出现目标的频谱范围, 并且高PRF时无多普勒模糊,所以可以根据多普勒频率抑制主瓣杂波而不会同时将目标抑制掉(唯一特殊的情况:目标沿切向飞行,但此种情况维持时间很短)。
高PRF工作模式下还有一些优点:在旁瓣杂波的中心谱线与对应的第一个重复边带之间,存在一个无杂波区。迎头接近目标的多普勒频率正好在该区域内;
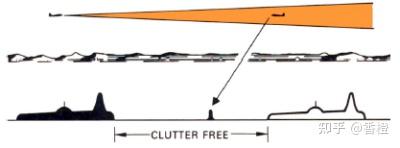
接近速率可直接通过检测多普勒频率而测量(无多普勒模糊);对给定的峰值功率,只要提高PRF直到占空比达到50%,就可简单地将平均发射功率增大到最高。
高PRF工作模式的主要限制:当检测低接近速率的尾随目标时,旁瓣杂波可降低雷达的探测性能 。原因有两点:一是机载火控雷达采用高PRF工作时,从所有目标来的回波被压缩到一个比目标回波占据的区域稍宽的距离段内(脉冲重复周期T很小,对应的一次距离也是很小的一个范围,所以所有回波都挤在一块,目标回波混在旁瓣杂波中难以通过距离分辨来区分),旁瓣杂波只能通过回波的多普勒频率分辨来抑制;二是与目标回波落入同一频率分辨单元的旁瓣杂波的大部分,是从很近距离上反射回来的,因而很强。
| 序号 | 优点 | 缺点 |
|---|---|---|
| 1 | 迎头探测性能好,高接近速率目标出现在无杂波频谱区内 | 低接近速率的目标,探测距离可能因旁瓣杂波而下降 |
| 2 | 提高PRF可得到高的平均功率 | 不能使用简单而精确的脉冲延时测距法 |
| 3 | 抑制主瓣杂波时不会同时抑制掉目标回波(从频域角度看) | 接近速率为零的目标可能与高度回波及发射机溢漏一起被抑制掉 |
中PRF工作模式
在同时存在主瓣杂波和强旁瓣杂波时,中PRF被认为是为探测尾随目标提供良好全方位覆盖的一个解决方案(从频域上看),如果要求的最大作用距离不特别远,PRF可设置得足够高,以提供主瓣杂波的周期性频谱线之间合适的间距,而又不导致特别严重的距离模糊。因此,根据主瓣杂波与目标回波的多普勒频率差别,就能将主瓣杂波从大多数目标回波中隔离开。并且通过距离分辨和多普勒分辨相结合的办法,单个目标也能从旁瓣杂波中隔离开。
主要有两个缺点:一是由于距离和多普勒频率均模糊,迎头和尾随方向的目标必须与近距旁瓣杂波对抗(迎头:频域上第一下边带落入近距旁瓣杂波区;尾随:自身多普勒频率落入近距旁瓣杂波区)。可通过PRF切换工作来解决。但会导致每个PRF的积累时间减少,限制了最大探测距离。但是在不要求探测距离特别远的情况下,如中、低空作战、俯视状态或尾随追击,合适的探测距离一般是可以达到的。
二是从大RCS的地面目标返回的旁瓣杂波可能是一个严重的问题(容易和飞机目标相混淆)。
| 序号 | 优点 | 缺点 |
|---|---|---|
| 1 | 全方位性能好,即抗主瓣杂波和副瓣杂波的性能都较满意 | 低、高接近速率目标的探测距离均受旁瓣杂波的限制(从频域角度看) |
| 2 | 易于消除地面动目标(从频域角度看) | 距离和多普勒模糊都必须解决 |
| 3 | 有可能采用脉冲延时测距 | 需采用专门措施抑制强地面目标旁瓣杂波 |
