旋转矩阵解决自然坐标系的正交分解及动量守恒问题

一,旋转矩阵
1,和一般解法相比的优势:
一般解法,即普通的正交分解,有时候会很麻烦,甚至要使用三角函数的和差角去做。但是2•2的矩阵乘法,算起来特别方便。
2,线性变换的几何意义。
我本人特别讨厌课本上的讲解,因为它仅告诉你怎么算,却缺乏几何直观,导致概念理解枯燥无味而且难。而我本人是收到了3blue1brown的启发。深刻了解线性代数的几何意义,才能更好的将其运用到数学模型,物理计算中。下面以二维的向量空间解释。线性代数的本质就是坐标变换。
比如这个矩阵可以看成向量(1,2)。而方阵
可以看成单位向量i与j的变换。i原来是(1,0),现在变成了(1,1)。j原来是(0,1),现在变换成(-1,2)所以“新的”x轴和y轴也随i与j而变换,所成的坐标系长这样
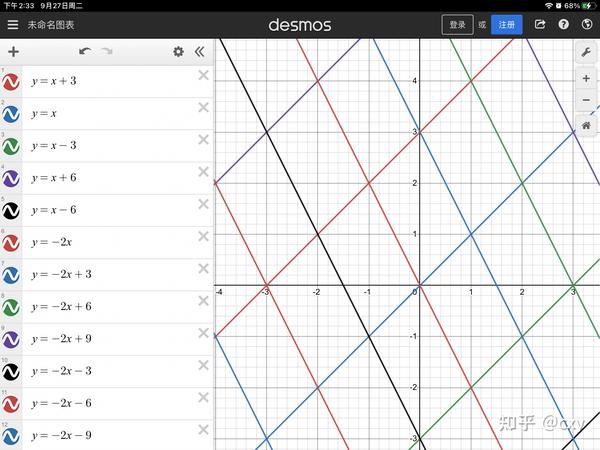
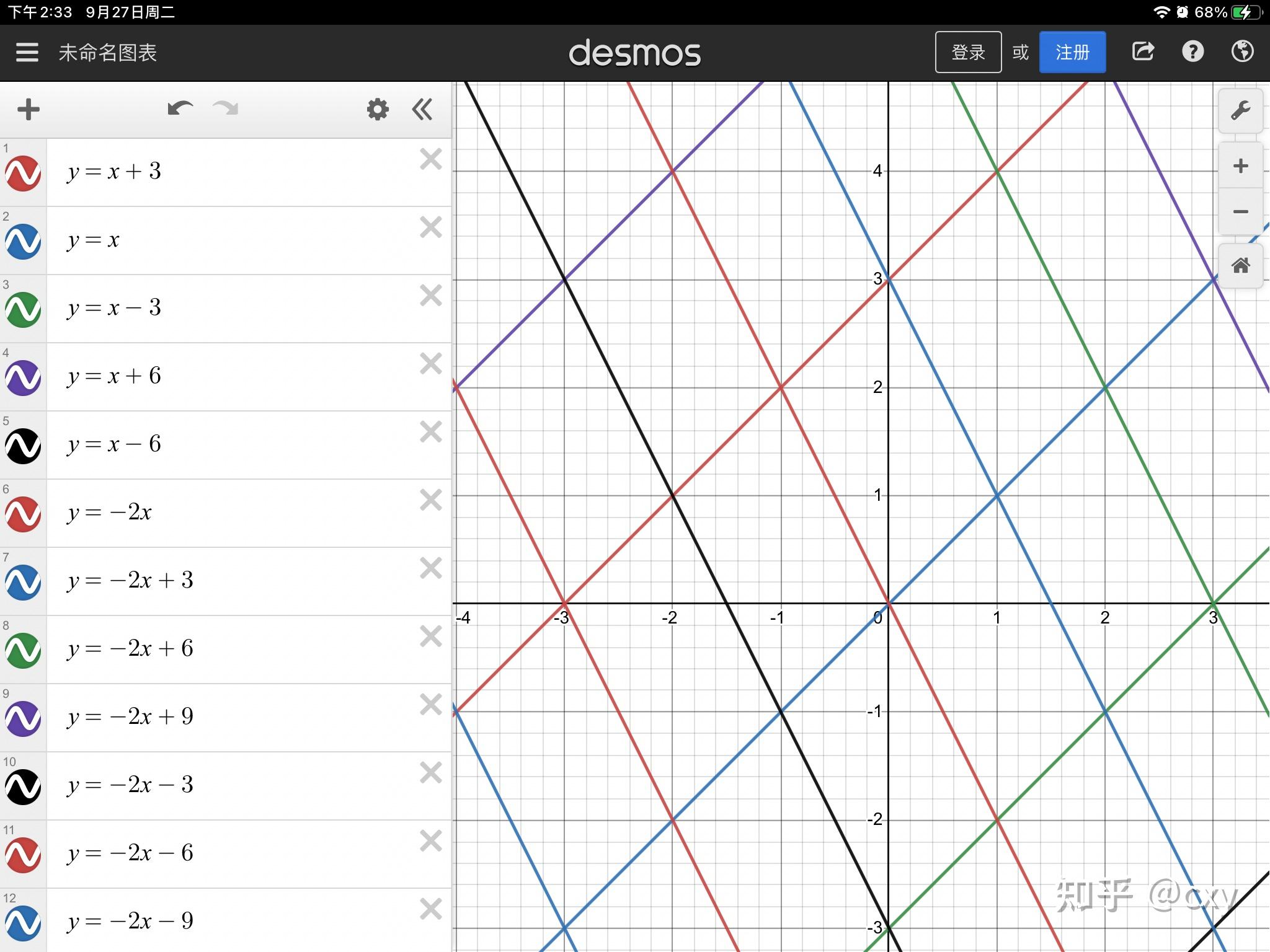
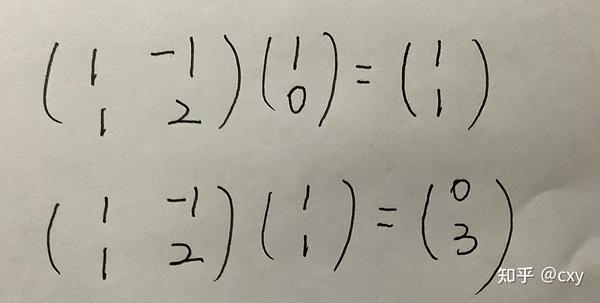
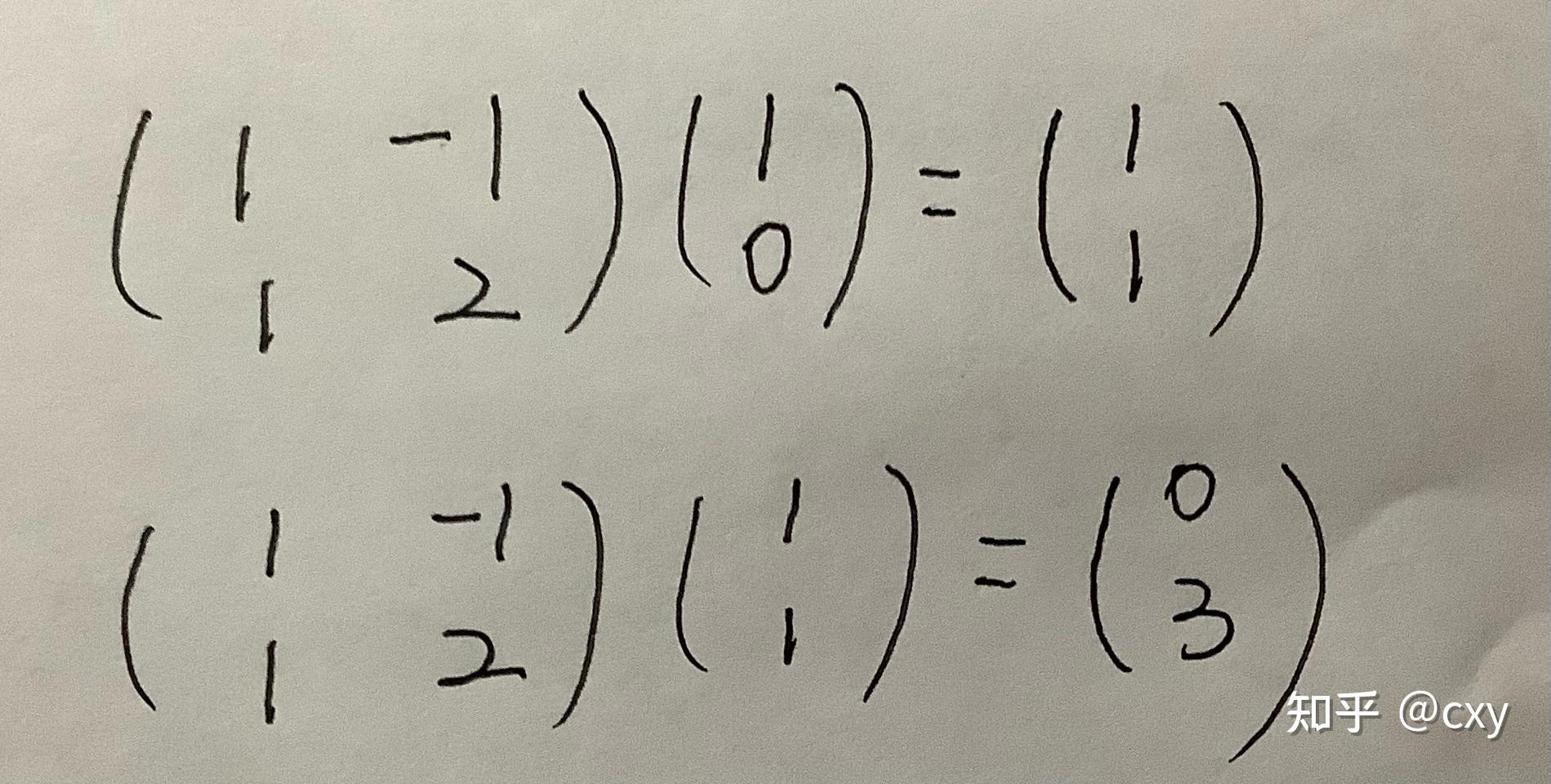
比如,原来的(1,0)变到了(1,1)。原来的(1,1)变到了(0,3)
用线性代数的方法描述,就是
3,行列式的意义与逆矩阵
记矩阵为A,其行列式是|A|,它的值的绝对值就是原来1·1方格经过变换后的面积。
单位矩阵记为E。其意思就是不做变换。为
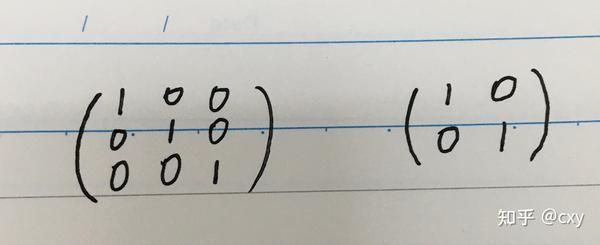
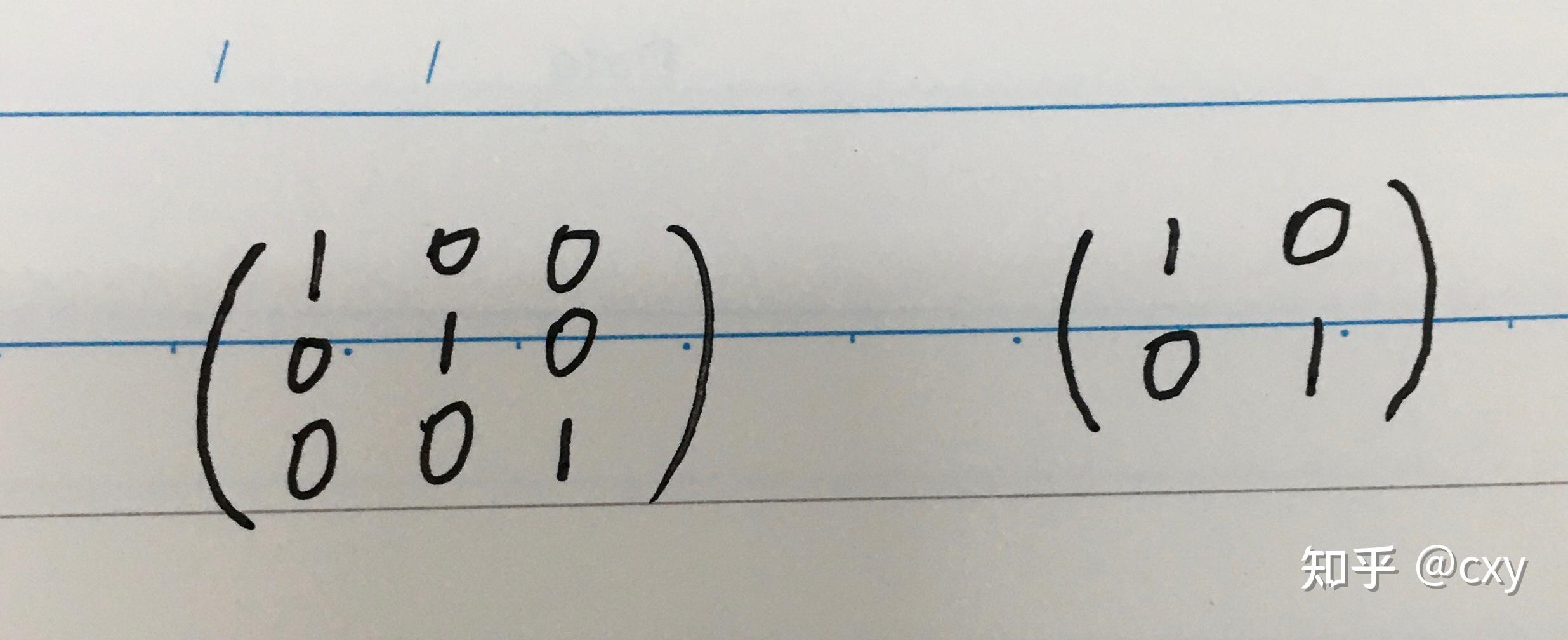
左边是三维的右边是二维的。逆矩阵记做A^-1。当A的秩不为0时,有AA^-1=A^-1A=E。意思是xOy坐标经过变换A后再进行变换A^-1后,仍然是xOy坐标。
4,旋转矩阵
将原来的xOy坐标旋转一个角度形成一个新的坐标系,那么乘的矩阵就叫做旋转矩阵。经过变换后,i和j长度仍然是1,仍然互相垂直。比如
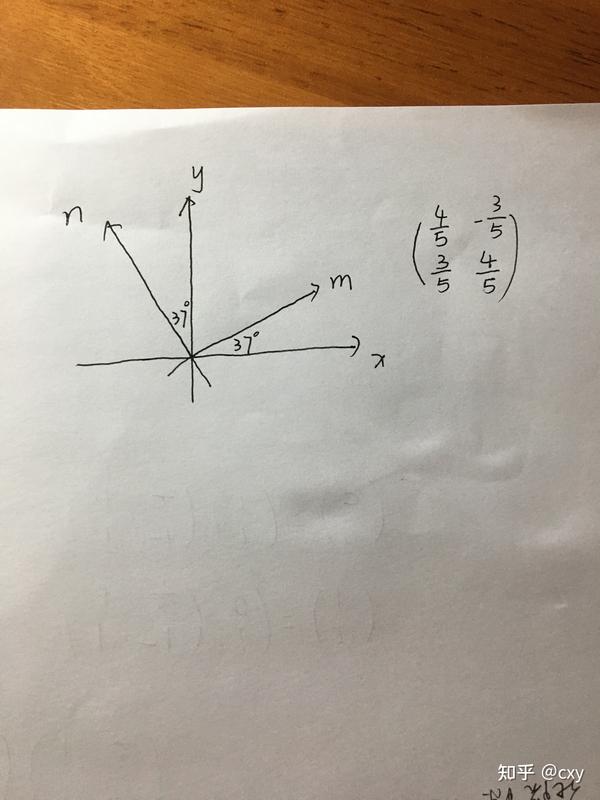
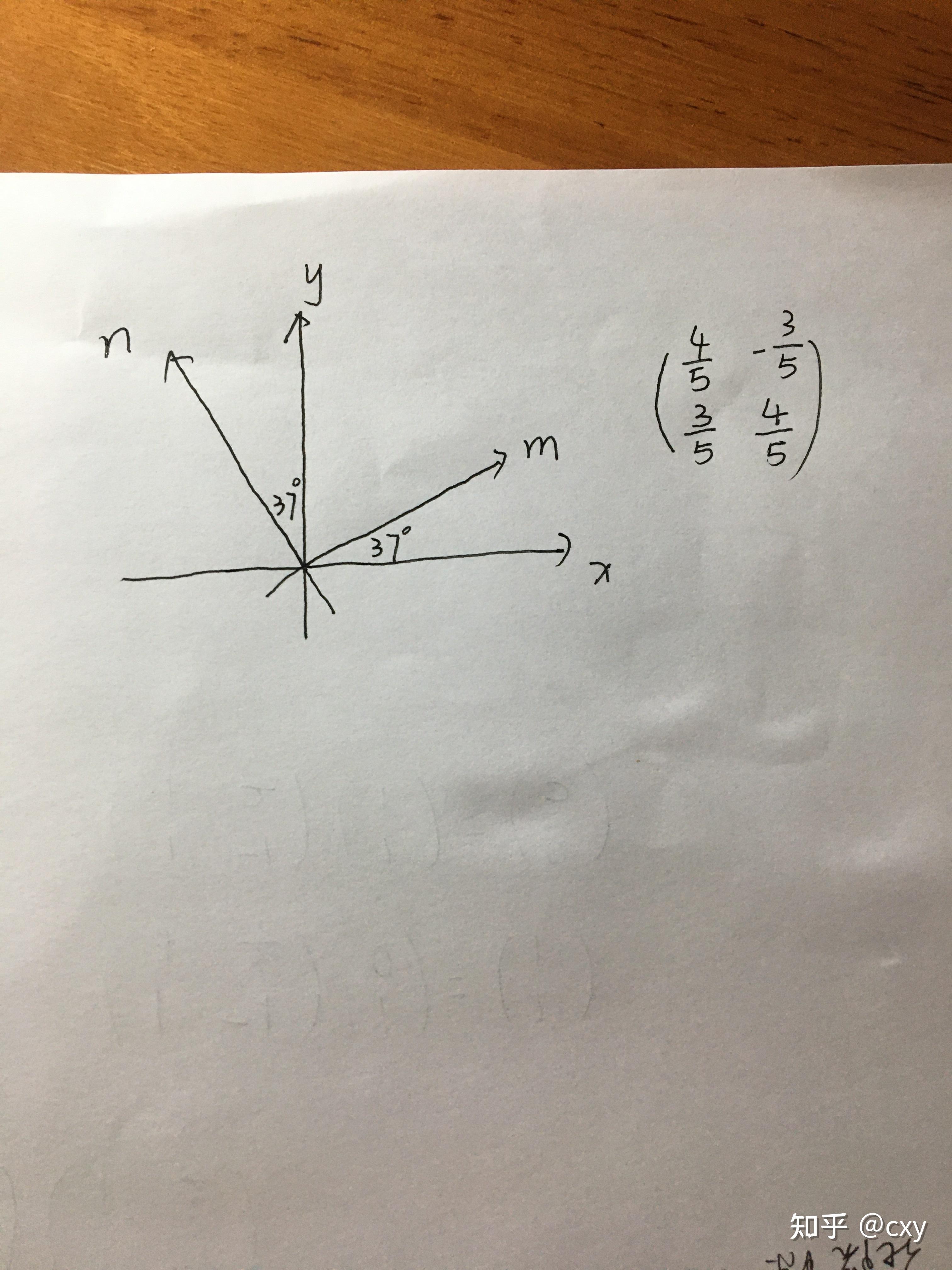
我们要满足上面条件。可以写为
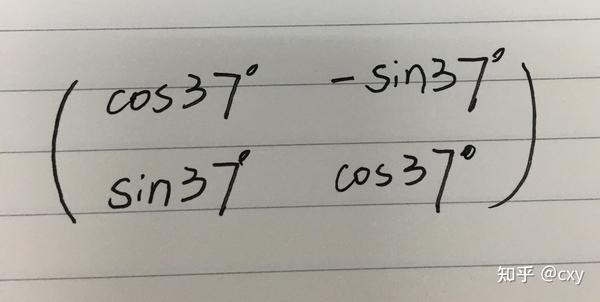
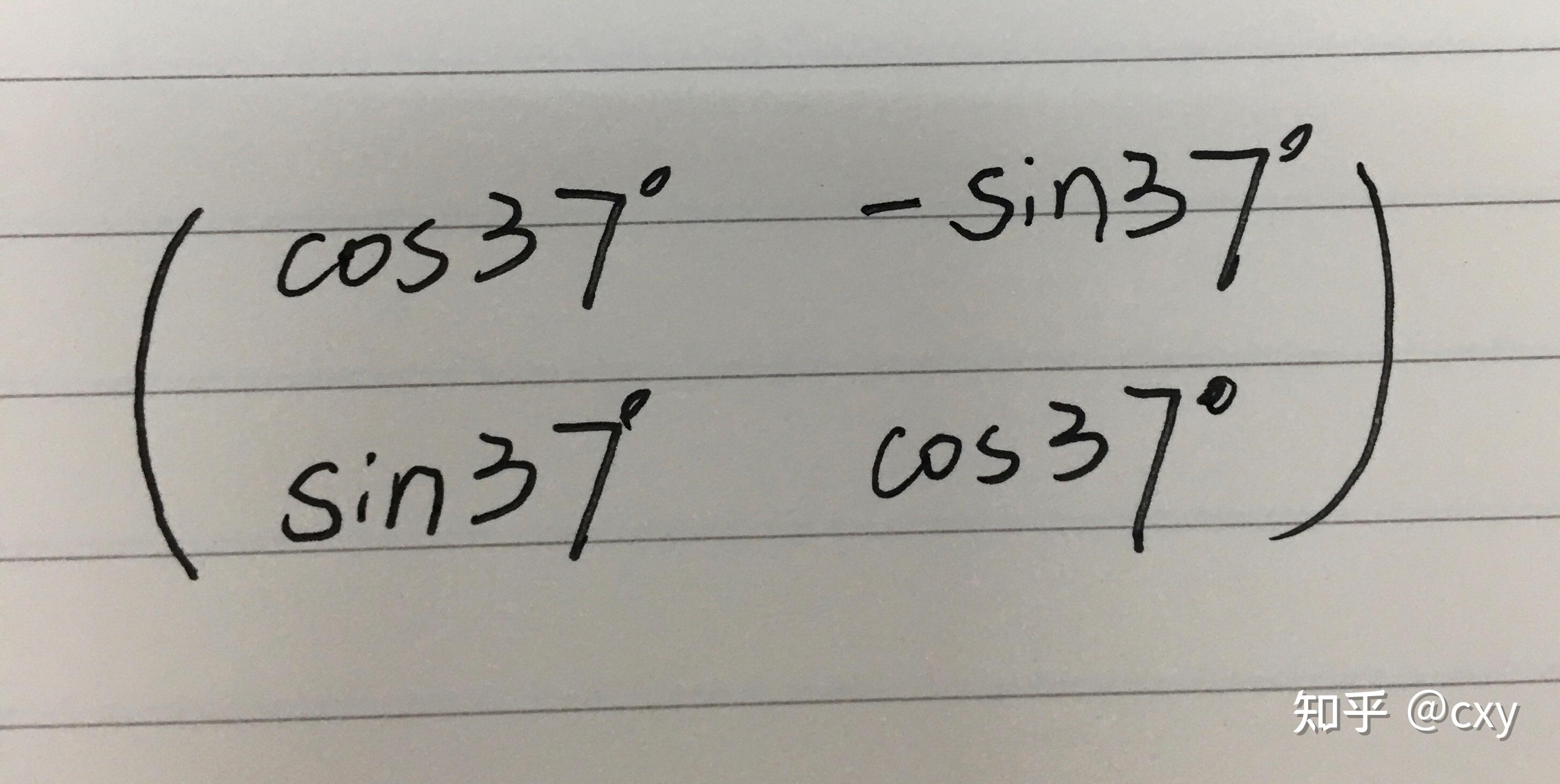
单位化使得其行列式为1
二,自然坐标系的运用
1,自然坐标系
自然坐标系以物体速度朝向为切向建系。法向方向指向曲率圆的圆心。可以说,物体时时在运动,坐标系也在时时变化。所以用矩阵(方程)表示,在一般情况下都可以简化计算。
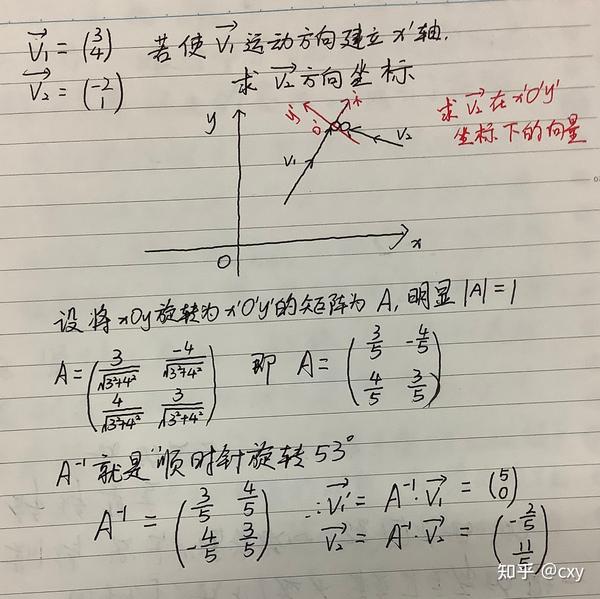
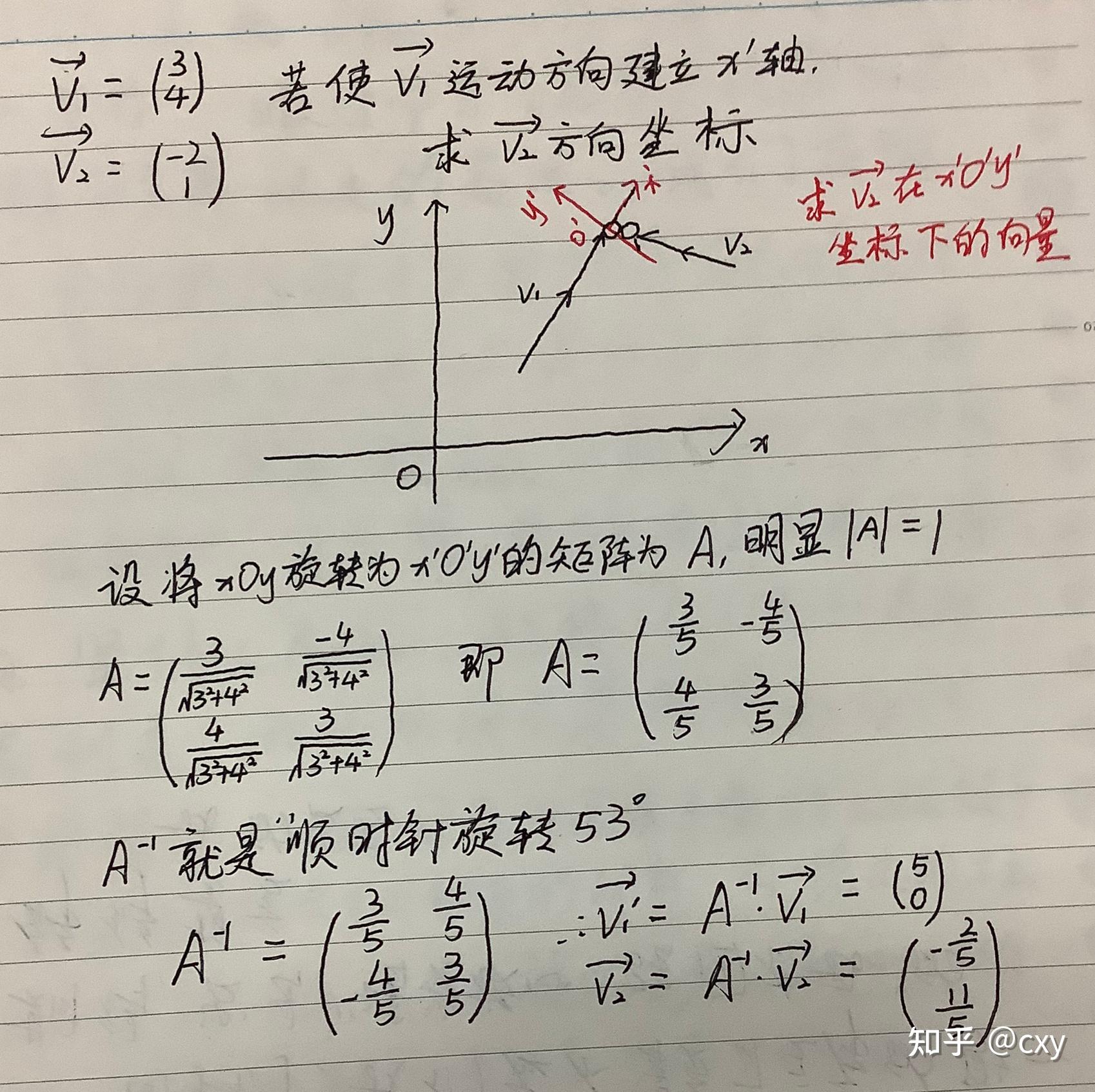
2,例题实战
用相似去算,同时使行列式化一,以切向为i的新方向,法向为j的新方向。那么有
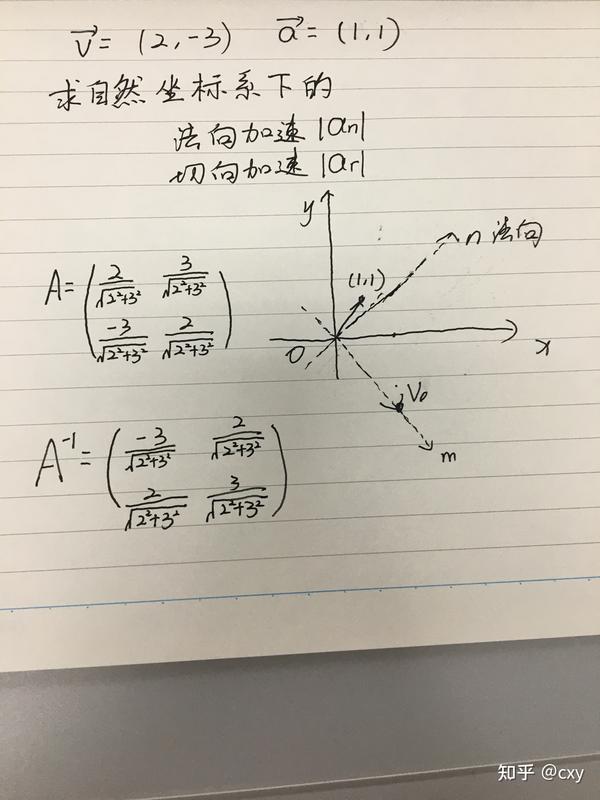
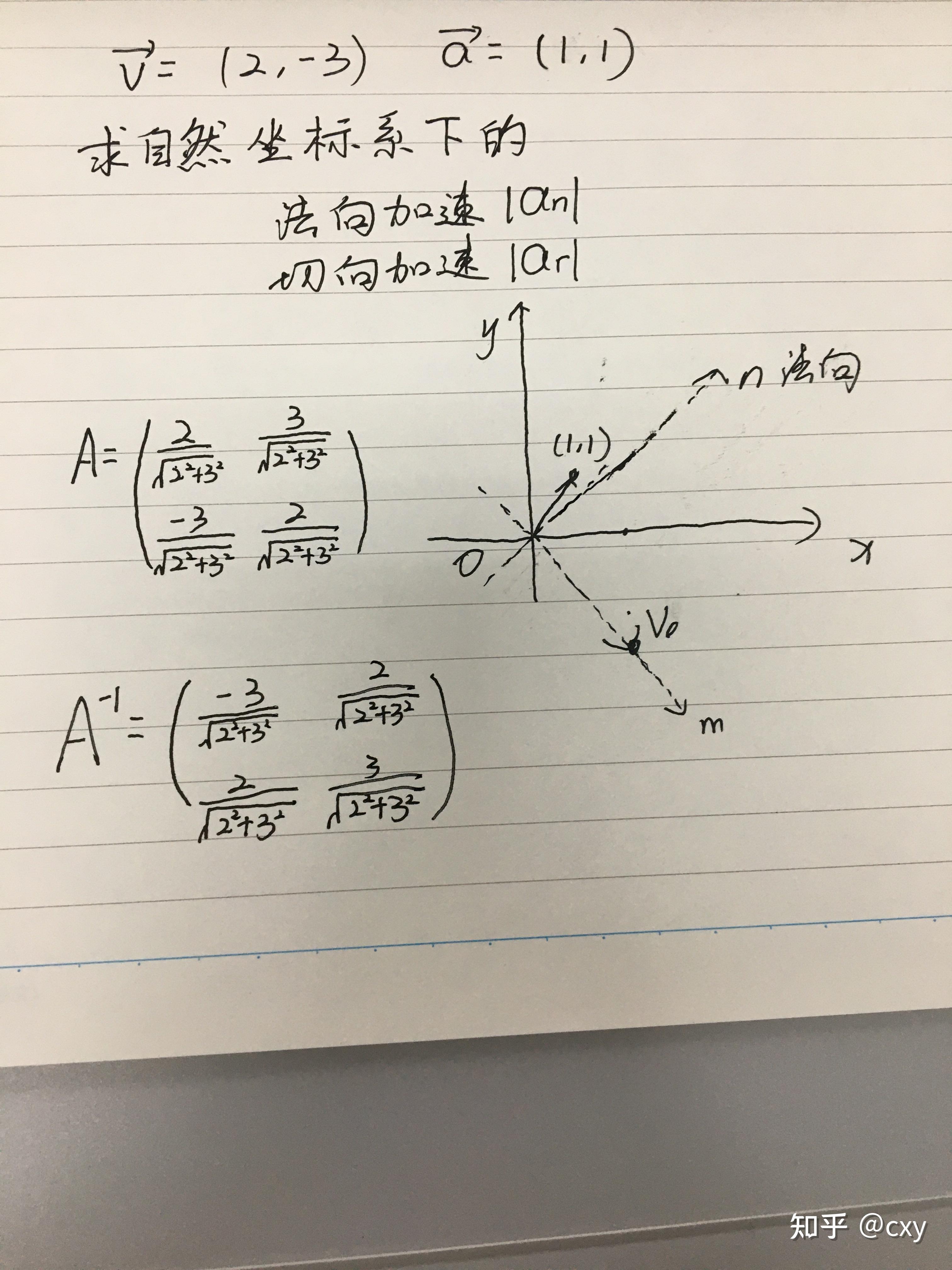
A是xOy顺时针旋转arctan(3/2)。明显A^-1就是逆时针旋转arctan(3/2)通过相似全等之类的很容易写出矩阵A^-1。所以想在mOn里表示a的坐标。只需要求
这样就有效避免了三角函数,最关键的是,可以用矩阵方程去表示任意时刻的加速度。
3,复变函数
旋转坐标,与复变函数中的exp函数是一样的。因此,求解正交分解,用复变函数同样是可以操作的,这里就暂时不展示了
三,碰撞模型的简化计算
1,非对心碰撞
非一维的碰撞,质心运动的方向不在同一直线上,称此为非对心碰撞,我们可以使用正交分解,那么x轴和y轴上分别有动量守恒。所以对于这类问题,尤其是计算动能损失率的题目时,会格外痛苦,因为在x和y轴上都要列方程。
2,简化计算
我们利用旋转矩阵或者复变函数,可以把问题简单化。比如,将其中一个小球的运动转为x'轴上的运动,那么其在y轴上就不用讨论了,而且第二个小球的y’方向的动量保持不变。大大简化计算。
3,实战解析