

深蓝学院多传感器融合课程第一期 课程1


深蓝学院多传感器融合课程第一期 课程1 学习记录
代码放在github: yandld/shenlan_multi_sensor_fusion
第一课内容:
- ICP 算法推导
- NDT算法推导
- LOAM/LEGO LOAM代码分析
ICP算法推导
主要参考:Least-Squares Rigid Motion Using SVD .自己理解,翻译得来。主要是推导最基础的点点ICP的原理:
摘要:这篇笔记总结了激光SLAM中如何计算最基础的点点ICP的数学推导过程。
问题的定义
定义 \mathcal{P}=\left\{\mathbf{p}_{1}, \mathbf{p}_{2}, \ldots, \mathbf{p}_{n}\right\} 和 \mathcal{Q}=\left\{\mathrm{q}_{1}, \mathrm{q}_{2}, \ldots, \mathrm{q}_{n}\right\} , \mathcal{P} 和 \mathcal{Q} 是两个二维空间或者三维空间中的点集合(激光SLAM数据)。我们要寻找一个"最可能的"位姿变换 R , t 使得代价函数最小,数学表达如下:


其中 w_{i}>0 是每一个数据点的权重。
求解平移向量t
先假设 R 已经被求出来了,记 F(\mathbf{t})=\sum_{i=1}^{n} w_{i}\left\|\left(R \mathbf{p}_{i}+\mathbf{t}\right)-\mathbf{q}_{i}\right\|^{2} 。我们可以通过 F(t) 对 t 求导的放出求出最优的 t :
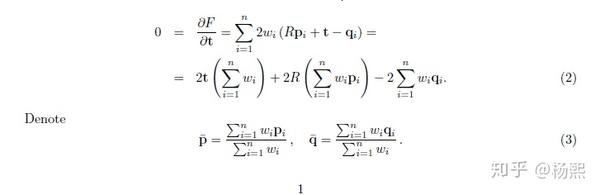

轻松可得:
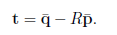
也就是说:最优的 t 实际上就是把 \mathcal{P} 的几何中心(平均值)平移到 \mathcal{Q} 的几何中心上。下面的问题就是求解旋转矩阵 R ,使得 R 满足:


其中 X_{i}, Y{_i} 为两个点集的几何中心:

求解旋转矩阵R
展开公式8,得到:


注意到 \mathbf{x}_{i}^{\top} R^{\top} \mathbf{y}_{i} 是一个标量,有: \mathbf{x}_{i}^{\top} R^{\top} \mathbf{y}_{i}=\left(\mathbf{x}_{i}^{\top} R^{\top} \mathbf{y}_{i}\right)^{\top}=\mathbf{y}_{i}^{\top} R \mathbf{x}_{i}
于是得到:


于是乎:这里来了最精彩的部分:
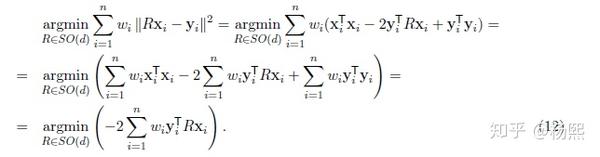


最小话和最大化转换一下:


最终得到:


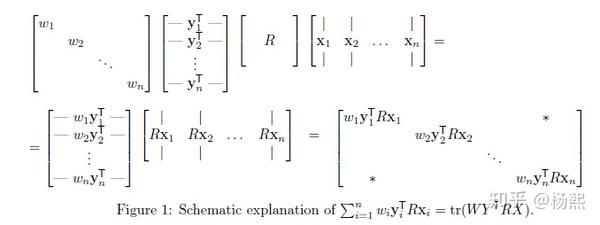
其中
- W=\operatorname{diag}\left(w_{1}, \ldots, w_{n}\right) 是一个 n \times n 对角矩阵,包含了 i 上每一个点的权重 w_{i}
- Y 是一个 d \times n (d是维数,比如2或者3)的矩阵,每一个激光点 y_{i} 作为一列
- X 是一个 d \times n (d是维数,比如2或者3)的矩阵,每一个激光点 x_{i} 作为一列
问题现在转换为: 寻找一个旋转矩阵 R 是的最大化 \operatorname{tr}\left(W Y^{\top} R X\right) 。注意到矩阵的迹有性质: \operatorname{tr}(A B)=\operatorname{tr}(B A) .所以有:


定义 d \times d 协方差矩阵为 S=X W Y^{\top} ,然后将 S 进行SVD分解: S=U \Sigma V^{\top} ,将SVD分解的结果带入16:


注意到 V,R,U 都是正交矩阵,所以 M=V^{\top} R U 必然也是一个正交矩阵。等价于 M 的每一列相互正交切长度的为1的向量,所以有 \mathrm{m}_{j}^{\top} \mathrm{m}_{j}=1 ,对于 M 中的任意元素 m_{i j} 都有 m_{i j}<1


下面是神奇的部分!!!
那么 \operatorname{tr}(\Sigma M) 的最大值多低怎么求呢? 不要忘记 \Sigma 是对角矩阵,所以对于任意非负对角线元素: \sigma_{1}, \sigma_{2}, \ldots, \sigma_{d} \geq 0 有:


如果说当 M 矩阵的每一个对角线元素 m_{ii}=1 的时候, \operatorname{tr}(\Sigma M) 有最大值,但是 M 是一个正交矩阵呀!所以只有当 M 是单位阵的时候才能有 m_{ii}=1 !!!


所以 最终结论 : R=V U^{\top}
总结
1. 问题的定义:代价函数:
2. 计算两个点集合的几何中心:
3. 得到中心化的点集(均值平移到0上):

4. 计算两个点集写方差矩阵:


5. SVD分解协方差矩阵,得到R:
6. 求得平移向量:
第一课作业
对于搞嵌入式开发的我做这第一个作业有点头疼,ubantu系统,装ROS,速成ROS,配套库安装就折腾了半天,虚拟机还经常死机。。只是把第一题做出来了。。(虚拟机实在是太卡了,这课要继续上下去估计要买电脑了。。)
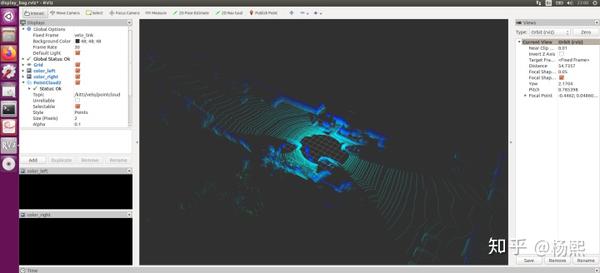
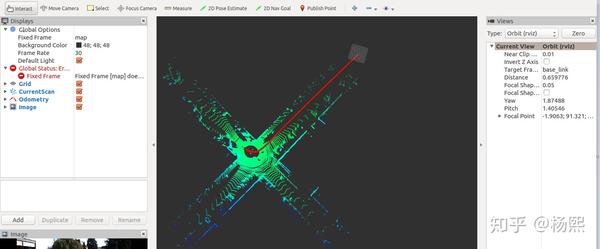
1. 了解 KITTI 数据集,完成相关依赖库的安装,运行作业代码,提供程序运行成功的截图(参考 PPT 基于数据集实现的 1, 2 项)第一题,不需要任何编程,环境搭起来,KITTI数据集跑起来就可以了。中间遇到的一些磕磕碰碰没啥说的,都是非算法问题。需要运行命令为:rviz -d display_bag.rviz


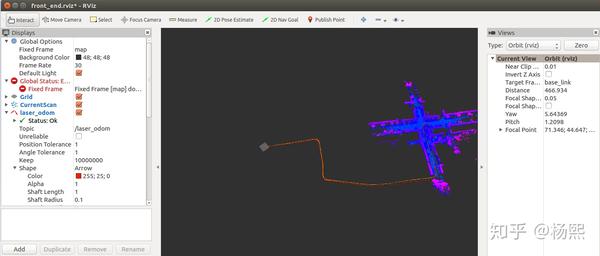

2. 在作业代码中,仿照写好的基于 NDT 的匹配,重新建立一个基于 ICP 的里程计(可以
使用 PCL),要求可在配置文件中切换两种方法。之后使用 evo 评估两种算法得到的轨迹
精度(参考 PPT 基于数据集实现的 3, 4 项);照猫画虎把ICP hpp,cpp 添加上了,并且网上搜了一个ICP IterativeClosestPoint 的demo,照着套上了:
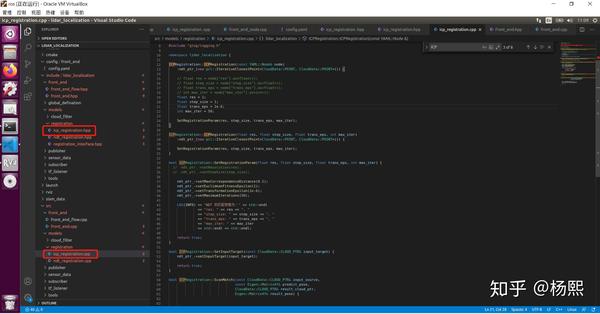

hpp里内容如下:
/*
* @Description: icp 匹配模块
* @Author: Ren Qian
* @Date: 2020-02-08 21:46:57
#ifndef LIDAR_LOCALIZATION_MODELS_REGISTRATION_ICP_REGISTRATION_HPP_
#define LIDAR_LOCALIZATION_MODELS_REGISTRATION_ICP_REGISTRATION_HPP_
#include <pcl/registration/icp.h>
#include "lidar_localization/models/registration/registration_interface.hpp"
namespace lidar_localization {
class ICPRegistration: public RegistrationInterface {
public:
ICPRegistration(const YAML::Node& node);
ICPRegistration(float res, float step_size, float trans_eps, int max_iter);
bool SetInputTarget(const CloudData::CLOUD_PTR& input_target) override;
bool ScanMatch(const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose) override;
private:
bool SetRegistrationParam(float res, float step_size, float trans_eps, int max_iter);
private:
pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>::Ptr ndt_ptr_;
#endif
cpp里内容如下,参数直接写死了先试试:
/*
* @Description: NDT 匹配模块
* @Author: Ren Qian
* @Date: 2020-02-08 21:46:45
#include "lidar_localization/models/registration/icp_registration.hpp"
#include "glog/logging.h"
namespace lidar_localization {
ICPRegistration::ICPRegistration(const YAML::Node& node)
:ndt_ptr_(new pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>()) {
// float res = node["res"].as<float>();
// float step_size = node["step_size"].as<float>();
// float trans_eps = node["trans_eps"].as<float>();
// int max_iter = node["max_iter"].as<int>();
float res = 1;
float step_size = 1;
float trans_eps = 1e-6;
int max_iter = 50;
SetRegistrationParam(res, step_size, trans_eps, max_iter);
ICPRegistration::ICPRegistration(float res, float step_size, float trans_eps, int max_iter)
:ndt_ptr_(new pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>()) {
SetRegistrationParam(res, step_size, trans_eps, max_iter);
bool ICPRegistration::SetRegistrationParam(float res, float step_size, float trans_eps, int max_iter) {
// ndt_ptr_->setResolution(res);
// ndt_ptr_->setStepSize(step_size);
ndt_ptr_->setMaxCorrespondenceDistance(1);
ndt_ptr_->setEuclideanFitnessEpsilon(1);
ndt_ptr_->setTransformationEpsilon(1e-4);
ndt_ptr_->setMaximumIterations(30);
LOG(INFO) << "NDT 的匹配参数为:" << std::endl
<< "res: " << res << ", "
<< "step_size: " << step_size << ", "
<< "trans_eps: " << trans_eps << ", "
<< "max_iter: " << max_iter
<< std::endl << std::endl;
return true;
bool ICPRegistration::SetInputTarget(const CloudData::CLOUD_PTR& input_target) {
ndt_ptr_->setInputTarget(input_target);
return true;
bool ICPRegistration::ScanMatch(const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose) {
ndt_ptr_->setInputSource(input_source);
ndt_ptr_->align(*result_cloud_ptr, predict_pose);