


第八讲 系统的时域响应

[1] 衡量自动控制系统性能的指标有三个:稳定性、快速性、稳态精度,也就是我们常说的稳、快、准。对于低阶的系统,一般使用时域分析法来考察这些性能会很直接简便,可以直接解出响应曲线,再找到参数和对应性能之间的关系,就可以进行系统分析和校正、设计了。
一、时域分析法
对于一单输入单输出n阶线性定常系统,可用一n阶常系数线性微分方程来描述。
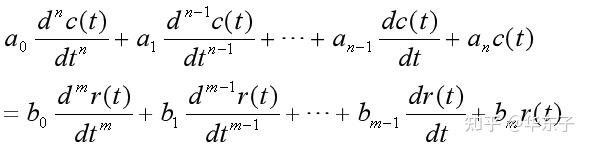
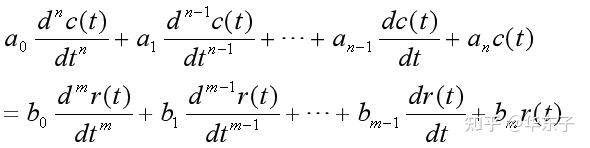
系统在输入信号r(t)作用下,输出c(t)随时间变化的规律,即式(8-1)微分方程的解,就是系统的时域响应-动态响应。
由线性微分方程理论知,方程式的解由两部分组成,即
c(t)=c_1(t)+c_2(t) \\
c1(t)——对应齐次微分方程的通解
c2(t)——非齐次微分方程的一个特解
(一)动态响应及其组成
动态响应——在输入信号作用下,系统输出随时间的变化过程。
系统的动态响应由两部分组成:暂态响应和稳态响应。
从系统响应的两部分看,稳态分量(特解)是系统在时间t→∞时系统的输出,衡量其好坏是稳态性能指标:稳态误差。系统响应的暂态分量是指从t=0开始到进入稳态之前的这一段过程,采用动态性能指标,如稳定性、快速性、平稳性等来衡量。
时域分析法是根据 系统的微分方程,对一个特定的输入信号,解出系统的时间响应。再根据系统的表达式及对应曲线来分析系统的性能。如:稳定性、准确性、快速性等。用时域分析系统性能具有直接、准确、易于接受等特点。是经典控制理论中进行系统性能分析的一种重要方法。
(二)典型激励信号(输入信号)
对于一个实际系统其输入信号往往是比较复杂的,而系统的输出响应又与输入信号类型有关。因此,在研究自动控制系统的响应时,往往选择一些典型输入信号,并且以最不利的信号作为系统的输入信号,分析系统在此输入信号下所得到的输出响应是否满足要求,估计系统在比较复杂信号作用下的性能指标。
常采用的典型输入信号有:
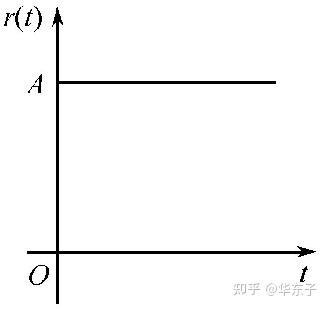
1、 阶跃函数
数学表达式
它表示一个在瞬时出现的,幅值为A的阶跃变化函数,如图所示。在实际系统中,如负荷突然增大或减小,流量阀突然开大或关小均可以近似看成阶跃函数的形式。
A=1的函数称为单位阶跃函数,记作1(t)。因此,幅值为的阶跃函数也可表示为
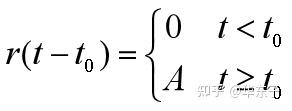
出现在 t=t_0 时刻的阶跃函数,表示为
2、 斜坡函数(速度函数)
它的数学表达式为
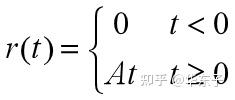
斜坡函数从t =0时刻开始,随时间以恒定速度增加。如图所示。A=1时斜坡函数称作单位斜坡函数。
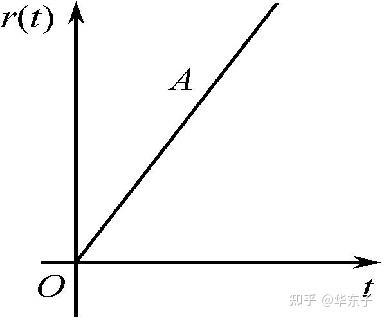
斜坡函数等于阶跃函数对时间的积分,反之,阶跃函数等于斜坡函数对时间的导数。
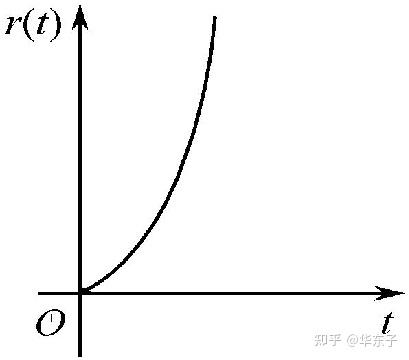
3 、抛物线函数(加速度函数)
它的数学表达式为
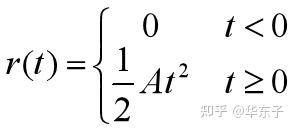
曲线如图所示。当A=1时,称为单位抛物线函数。抛物线函数是斜坡函数对时间的积分。
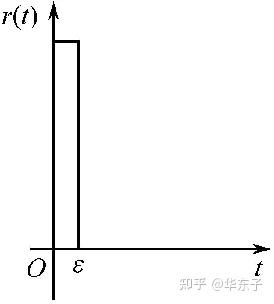
4 、脉冲函数
它的曲线如图所示,数学表达式为
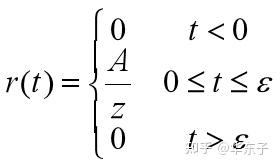
其面积为A。即
面积A表示脉冲函数的强度。
的脉冲函数称为单位脉冲函数,记作 \delta (t) ,即
于是强度为A的脉冲函数可表示为 A\delta (t) .
\delta (t-t_0) 表示在时刻 t=t_0 出现的单位脉冲函数,即
单位脉冲函数是单位阶跃函数的导数
5 、正弦函数
它的数学表达式为
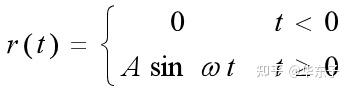
式中A为振幅,ω为角频率,正弦函数为周期函数。
当正弦信号作用于线性系统时,系统的稳态分量是和输入信号同频率的正弦信号,仅仅是幅值和初相位不同。根据系统对不同频率正弦输入信号的稳态响应,可以得到系统性能的全部信息。
(三) 系统的时域性能指标
控制系统的时域性能,主要用系统的稳定性、稳态性能、暂态性能来评价,这些性能与控制系统的结构、参数等有关。
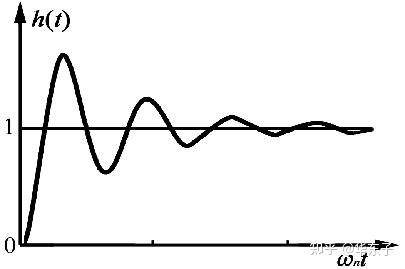
控制系统的时域性能指标通常是以零初始条件下的单位阶跃响应曲线为依据。
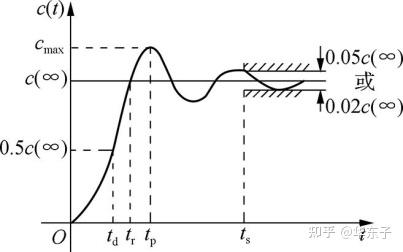
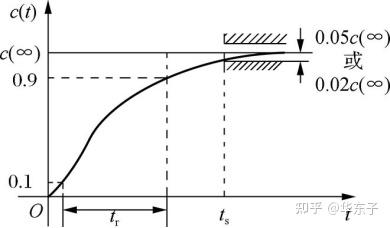
当控制系统受到输入信号或扰动信号的作用时,由于系统的惯性原因,系统不可能立刻产生输出响应,而是表现出一定的瞬态响应过程。一种情况是跟随得比较快,以至于超过稳态值后需要经过几次振荡衰减趋于稳态值,如图(a)所示。另一种情况是跟随得比较慢,整个过渡过程是单调的,如图(b)所示。
系统常用性能指标如下:
(1)延迟时间 t _d :指输出响应第一次达到稳态值50%所需的时间。
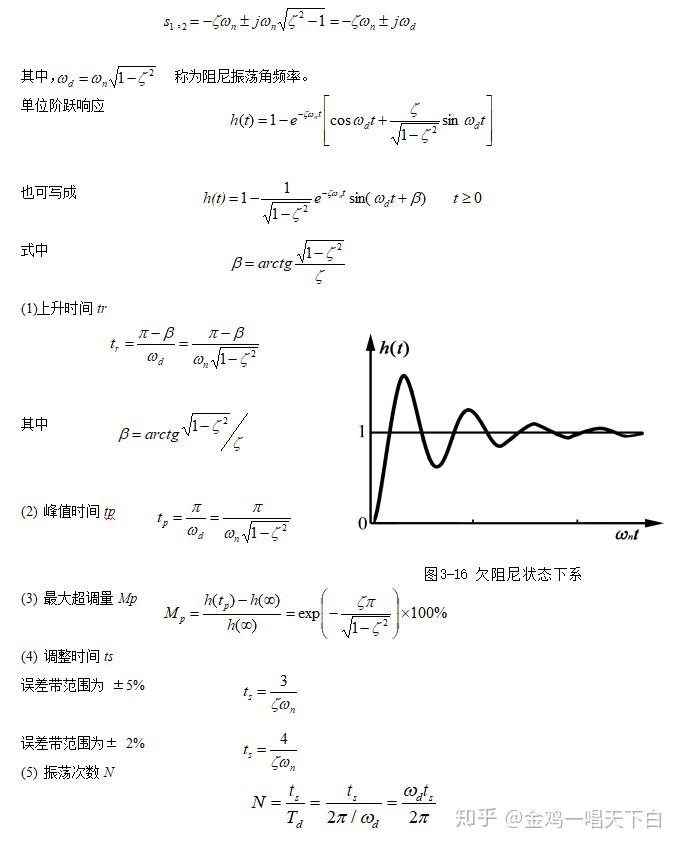
(2)上升时间 t_ r :指输出响应第一次上升到稳态值所需要的时间。对于欠阻尼二阶系统,通常采用由0上升到稳态值的100%所需的时间;对于过阻尼系统,通常采用由稳态值的10%上升到稳态值的90%所需的时间。
(3)峰值时间 t _p :指输出响应超过稳态值而达到第一个峰值 c_{max}=c(t_ p) 所需的时间。
(4)调节时间(或称过渡过程时间) t _s :指当c(t)和c(∞)之间误差达到规定允许范围(c(∞)的±5%或±2%),并且以后不再超出此范围所需的最小时间。
(5)最大超调量(简称超调量) σ_p :系统响应的最大值超过稳态值的百分比。即
(6)稳态误差e ss:当t→∞时,输出响应期望的理论值与实际值之差称为稳态误差。
上述性能指标中,延迟时间t d、上升时间t r和峰值时间t p均表征系统响应初始阶段的快速性;调节时间t s表示系统过渡过程的持续时间,从总体上反映了系统的快速性;最大超调量M p、振荡次数N反映了系统动态过程的平稳性。
这些指标描述了瞬态响应过程,反映了系统的动态性能,所以又称之为动态性能指标。
单调变化的阶跃响应曲线上有一些性能指标是不存在的,如上升时间、峰值时间、最大超调量等。
二、一阶系统的时域响应
1 数学模型
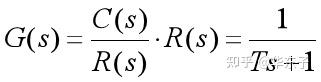
能够用一阶微分方程描述的系统为一阶系统,其传递函数为

其中 T ——一阶系统的时间常数
一阶系统是一个惯性环节。一阶系统的时间常数T是表征系统惯性的特征参数,它反映了系统过渡过程的品质,T越小,则系统响应越快;T越大,则系统响应越慢。
下面分析此系统对单位阶跃函数、单位斜坡函数和单位脉冲函数的响应。在分析过程中,假设初始条件为零。这里要注意的是,具有相同传递函数的所有系统,对同一输入信号的响应是相同的。
2 单位阶跃响应
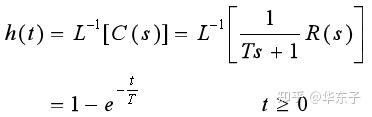
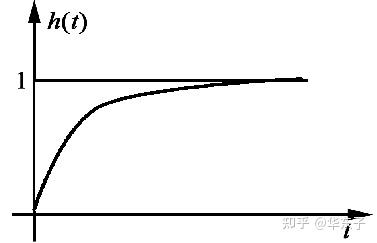
当 r ( t )=1( t )时,一阶系统的输出 c ( t )称为单位阶跃响应,记作 h ( t )。
输入信号:r(t)= u(t),R(s)= L[u(t)] = 1/s
C(s)= G(s)Xi(s)= 1/(TS+1)S
3.单位脉冲响应
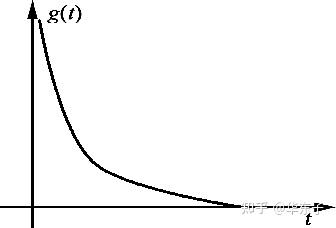
当输入信号r(t)=δ(t)时,系统的输出称为单位脉冲响应,记为g(t)。
当r(t)=δ(t), 即R(s)=1时,有


4单位斜坡响应
系统的输入信号为单位斜坡函数时,它的输出就是单位斜坡响应,系统的输出信号的拉氏变换为:

将其展开成部分分式,得到
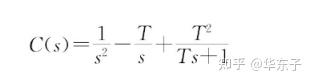
对式进行拉氏反变换,得到
c(t)=t-T+T e^{-t/T} ,t≥0
此时误差信号e(t)为
e(t)=r(t)-c(t) =t-(t-T+T e^{-t/T}) =T(1-e^{-t/T})
当t→∞时,e-t/T→0,e(t)→T,即e(∞)=T
由式可知,当t→∞,系统跟踪单位斜坡输入信号的误差等于T,显然,时间常数T越小,系统跟踪斜坡输入信号的误差也越小。
5 性能指标
1.调整时间 ts 经过时间3 T ~4 T ,响应曲线已达稳态值的95%~98%,可以认为其调整过程已完成,故一般取 ts =(3~4) T 。
2. 稳态误差 ess 系统的实际输出 h ( t )在时间 t 趋于无穷大时,接近于输入值,即

3. 超调量 Mp 一阶系统的单位阶跃响应为非周期响应,故系统无振荡、无超调, Mp =0。
三、二阶系统的时域响应
1 二阶系统的数学模型
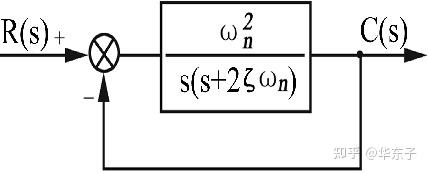
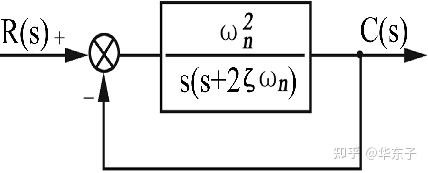
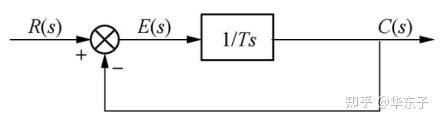
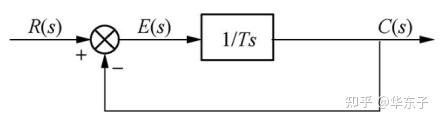
典型二阶系统的结构图如图所示,其闭环传递函数为
或者
其中ζ ——系统的阻尼比; ωn——系统的无阻尼自然振荡角频率;系统振荡周期为

系统的特征方程为

特征根为

2 二阶系统的单位阶跃响应
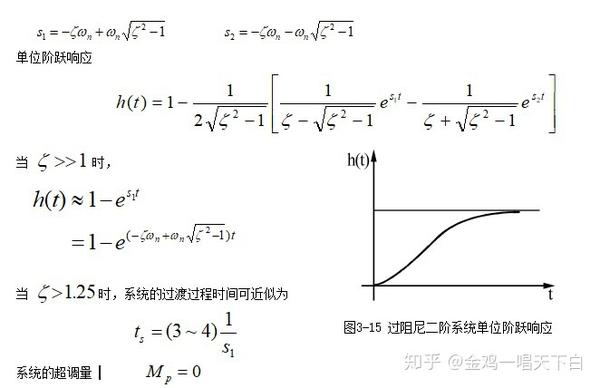
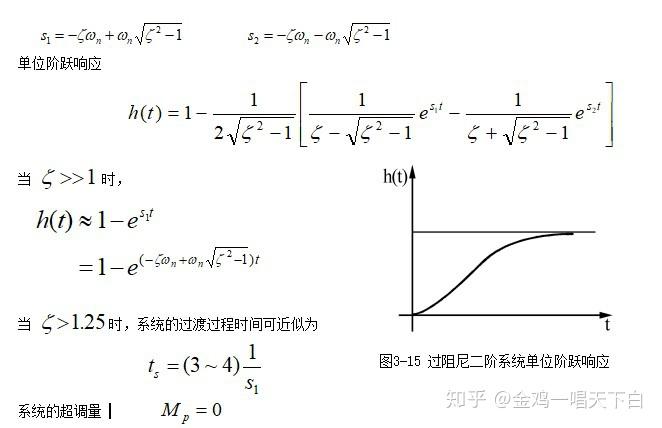
1.当 ζ >1时,系统有两个不相等的负实根,称为过阻尼状态。
两个不相等的负实根为
2. 当0< ζ <1时,系统有一对实部为负的共轭复根,称为欠阻尼状态。
在欠阻尼状态下,系统的两个闭环极点为一对共轭复极点,即

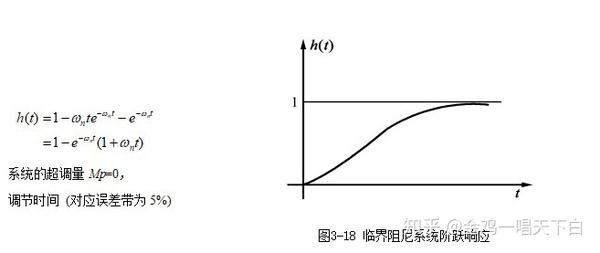
3. 当阻尼比 ζ =1时,系统的特征根为两相等的负实根,称为临界阻尼状态。
此时系统在单位阶跃函数作用下,
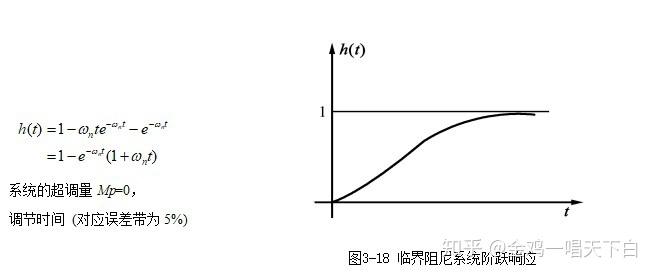
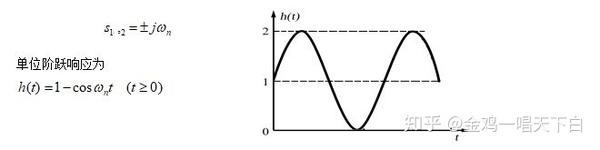
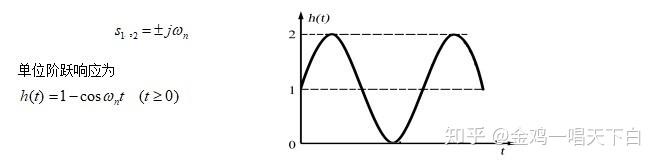
4. 当阻尼比 ζ =0时,系统特征根为一对纯虚根,称为无阻尼状态。
系统特征根
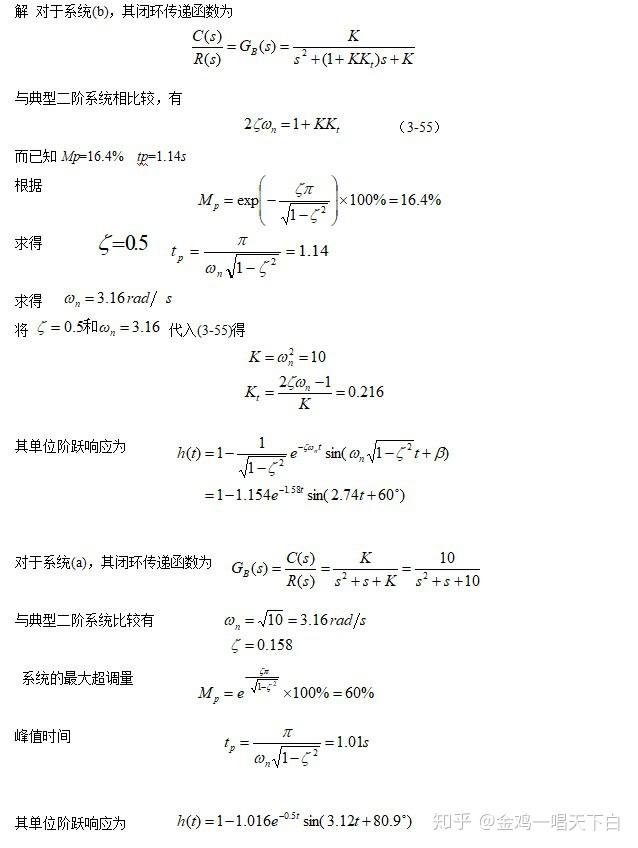
例 原控制系统如图3-23(a)所示,引入速度反馈后的控制系统如图3-23(b)所示,已知在图3-23(b)中,系统单位阶跃响应的超调量 Mp %=16.4%,峰值时间 tp= 1.14s,试确定参数 K 和 Kt ,并计算系统在(a) 和(b)的单位阶跃响应 h(t) 。

综上所述,二阶系统的性能完全取决于系统参数ζ和ωn,具体归纳如下:
(1)平稳性
二阶系统的平稳性主要由阻尼比ζ决定,ζ越大,超调量越小,系统的平稳性越好;相反,ζ越小,平稳性越差,ζ=0时系统不能稳定工作。当阻尼比一定时,ωn值越大,阻尼振荡频率ωd越高,系统响应的平稳性越差。总之,要使系统响应平稳性好,希望ζ相对较大,ωn相对较小。
(2)快速性
调节时间t s与ωnζ成反比,无阻尼自然频率ωn一定时,ζ越小,t s越大,快速性越差。因此,要使系统响应的快速性好,阻尼比不宜太大,无阻尼自然频率ωn值应尽可能选大。
(3)稳态精度
二阶系统稳定工作时,系统单位阶跃响应的稳态值c(∞)=1。
从各性能与参数间的关系看出,系统的平稳性和快速性不可能同时达到最佳状态。
为限制超调量,并使调节时间较短,阻尼比一般应取0.4~0.8之间,这时超调量σp约在25%~1.5%之间,而调节时间很短。
工程上常取ζ=0.707作为设计依据,称之为二阶工程最佳。 此时,超调量为4.3%,而调节时间t s最小(5%的误差标准)。
四、高阶系统的瞬态响应
1 高阶系统的瞬态响应


2 高阶系统的降阶
1. 主导极点
在整个响应过程中起着主要的决定性作用的闭环极点,我们称它为主导极点。
工程上往往只用主导极点估算系统的动态特性。即将系统近似地看成是一阶或二阶系统。
2. 偶极子
将一对靠得很近的闭环零、极点称为偶极子。工程上,当某极点和某零点之间的距离比它们的模值小一个数量级,就可认为这对零极点为偶极子。
闭环传递函数中,如果零、极点数值上相近,则可将该零点和极点一起消掉,称之为偶极子相消。
3 零极点对阶跃响应的影响
1.零点对阶跃响应的影响
假设系统中增加一个闭环实零点,即系统中增加了一个串联环节且闭环零点 z 位于复平面的左半平面,
可见,增加一个闭环左实零点以后,系统阶跃响应增加了一项,该项的值与 c ( t )的变化率成正比,与该零点离虚轴的距离成反比。显然,该零点的增加将使系统响应过程加快,超调量增大,系统对输入作用的反应灵敏了。
这将使系统响应过程变慢,超调量减小,系统对输入作用的反应变滞呆了。
2. 极点对阶跃响应的影响
假设系统增加一个闭环左实极点-|p|,系统在单位阶跃信号作用下输出


可以看出:系统中增加一个闭环左实极点,系统的过渡过程将变慢,超调量将减小,系统的反应变得较为滞呆。对于闭环传递函数存在右极点的情况,系统时域响应是发散的,系统不稳定 。
注:版权属笔者所有,如需转载请务必联系!

参考
- ^ 文中内容或图片如有侵犯您的权益,请联系作者删除。
