

cartographer目录结构


cartographer 整个源码分为两部分 cartographer 和 cartographer_ros 两部分
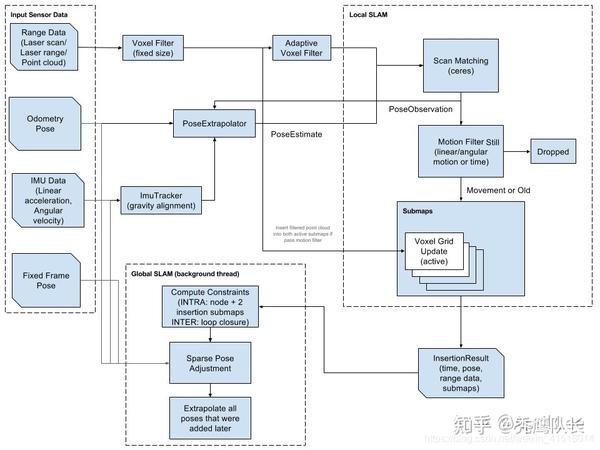
cartographer 主要负责处理来自Laser、IMU、Odometry等传感器的数据并基于这些数据进行地图的构建。所以这一部分应该说是cartographer代码的核心部分。
cartographer_ros 是基于ros的通信机制获取传感器的数据并将他们转换成cartographer中定义的格式传递给cartographer处理,与此同时也将cartographer的处理发布用于显示或保存。是基于cartographer的上层应用。所以,cartographer_ros相当于是对cartographer进行了一层ROS接口的封装。
A cartographer 部分源码分为以下几个文件夹 cloud, common, ground_truth, io, mapping, metrics, sensor, transform
位置:/src/cartographer/cartographer
1 cloud 云服务相关功能
2 common 定义基本的数据结构 以及一些工具的使用接口
3 ground_truth
4 io 定义一些与io相关的工具 存读取数据 记录日志
5 mapping 定义上层调用接口以及局部submap 构建和基于闭环检测得位姿优化等接口,里面的2d和3d是对mapping接口的不同实现
6 metrics
7 sensor 定义雷达和点云的数据结构
8 transform 定义位姿的相关结构和相关转换
没找到?(kalman_filter 通过卡尔曼滤波对 IUM 里程计 雷达 等位姿数据进行融合 ,进而估计新的laser scan的位姿)
/src/cartographer/configuration_flles
对算法参数的配置文件
B cartographer_ros 部分目录分为以下几个文件夹
1 cartographer_ros 里launch目录中存放的是各个launch脚本文件,有之前运行过的demo "demo_backpack_2d.launch"。urdf目录中则是用 URDF文件 描述的机器人模型,再下一级的cartographer_ros目录下才是官方ROS封装的源码
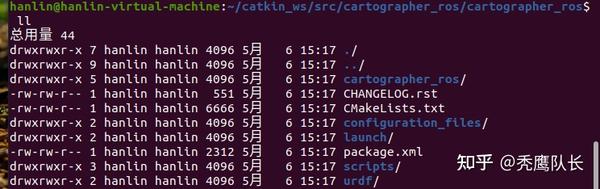

CHANGELOG.rst是修改日志。CMakeLists.txt和package.xml是标准的ROS包中的标配文件,package.xml描述了包的作者、依赖、版权等信息,CMakeLists.txt则定义了包的编译规则
2 cartographer_ros_msgs 定义了msg和srv 文件,为carto定义各种消息类型
3 cartogpher_rviz 是可视化相关工程
Common文件夹
1 port.h
int RoundToInt(const float x); //四舍五入取整
FastGzipString(const string& uncompressed, string* compressed); //压缩字符串string
FastGunzipString(const string& compressed, string* decompressed); //解压缩字符串
2 time.h
时间转换函数
两个别名?
using duration = std::chrono::duration<rep, period>;/*微秒*/
using time_point = std::chrono::time_point<UniversalTimeScaleClock>;/*时间点*/
FromSeconds(double seconds); //秒数seconds转为c++的duration实例对象:
ToSeconds(Duration duration); //将duration实例对象转为秒数s
ToUniversal(Time time);将c++的time_point对象转为TUC时间,单位是0.1us
3 fixed_ratio_sampler.h
频率固定的采样器类,目的是从数据流中均匀的按照固定频率采样数据
Pulse()产生一个事件pulses,并且:如果计入采样samples,返回true
DebugString():以string形式输出采样率
4 internal/rate_timer.h
explicit RateTimer(const common::Duration window_duration)构造函数提供时间段Duration
ComputeRate()返回事件脉冲率,单位hz
ComputeWallTimeRateRatio()返回真实时间与墙上挂钟时间的比率
内部类Event封装了某个事件发生的时间点?
调用一次Pulse()即产生了一次事件
DebugString() 以字符串形式输出
ComputeDeltasInSeconds() 计算以秒计的delta序列?
DeltasDebugString()计算delta序列的均值和方差
5 histogram.h
Histogram:直方图类
Add()//添加value,可乱序
ToString(int buckets )以字符串的形式输出buckets个直方图信息,bin大小是篮子个数,表示分为几块统计
6 thread_pool.h
对c++11 thread的封装,线程数量固定的线程池类?
构造函数ThreadPool(int num_threads) 初始化一个线程数量固定的线程池
7 internal/blocking_queue.h
构造函数BlockingQueue()初始化队列大小,kInfiniteQueueSize=0默认不限制容量。queue_size限制容量:通过条件变量做到
Push()添加元素,容量不够时,阻塞等待
PushWithTimeout(),添加元素,若超时则返回false
Pop()删除元素,没有元素时,阻塞等待
PopWithTimeout(),删除元素,若超时则返回false
Peek()返回下一个应该弹出的元素
PeekWithTimeout()像Peek, 但是会timeout
Sensor文件夹
点云数据是指在一个三维坐标系统中的一组向量的集合。
PointCloud是由Vector3f(x,y,z)组成的vector即std::vector(std???)
1 point_cloud.h
PointCloudWithIntensities则是由点云和光线强度组成的struct类。
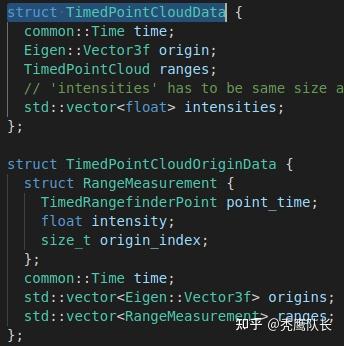
timedPointCloud是存储点的三维位置和它们的相对测量时间


根据transform参数转换点云


转换timedPointCloud
PointCloud CropPointCloud(const PointCloud& point_cloud, float min_z,float max_z);去掉z轴区域外的点云,返回一个新的
2 compressed_point_cloud.h
点云的压缩表示一个没有时间信息的点(Vector3f)的集合
点是按块分组的。每个区块编码一点元数据(区块中的点的数量,区块的坐标),每个点编码一点在block内的位置信息
3 range_data.h
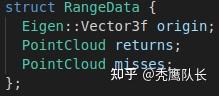
RangeData定义激光雷达传感器测量数据的存储结构Struct:
Eigen::Vector3f origin; {x0,y0,z0},原点坐标。
PointCloud returns; “return”障碍物位置{x,y,z},表示有反射。
PointCloud misses; 无反射,自由空间
RangeData TransformRangeData(const RangeData& range_data,const transform::Rigid3f& transform);对数据进行3d变换,转换为 机器坐标 ?
RangeData CropRangeData(const RangeData& range_data, float min_z, float max_z);根据min_z和max_z去除不在z轴范围内的点云,返回一个新的
proto::RangeData ToProto(const RangeData& range_data);将'range_data'转换为一个proto::RangeData, 序列化 ?
RangeData FromProto(const proto::RangeData& proto);反序列化,如上相反
4 Data.h \imu_data.h \odometry_data.h \range_data.h \landmark_data.h
根据传感器设置数据分装,都带有变成proto类下的属性( proto? )
Data是 Dispatchable的基类?
构造函数Data(const std::string &sensor_id) : sensor_id_(sensor_id)
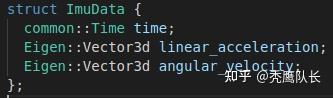
imu_data 有struct时间,线加速度,角速度
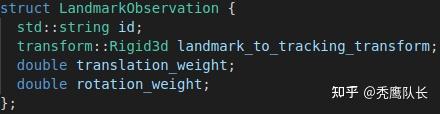
Landmark_data 分为observation观测数据和直接data(observation+time)

odometry_data 就是time和位姿(pose)
Range_data.h 分为原点,障碍点,然后如果miss了(这个应该是红外测距类?)
多一个transformRangeData方法(不重要)和一个 cropRangeData去除z轴区域
5Timed_Point_Cloud_Data
两个转换方法
timed_point_cloud_data ? 到proto::TimedPointCloudData
proto到TimedPointCloudData
git rm -r --cached . 之后修改ignore才有用
Carto测试:
source catkin_ws/devel_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
