相机SDK: CH-HCNetSDKV6.0.2.35_build20190411_Win64
之前常常采用python来读取usb摄像头,因为其语言风格易读且上手快。起先,使用rtsp流来读海康的网络相机,视频画面出现延迟卡顿的现象,如果对于实时性要求较高(起码得和网页预览效果相当的帧率)的话,用rtsp流读取的方式显得不可取,本文采用在python中调用HikVision的SDK读取IP相机的方式实现,帧率的话和网络预览效果相当。
python中调用C++形式的SDK, 首先是通过swig来封装需要的库。SDK给出的C++调用相机的实现算靠谱的了,所以尝试用该方法解决摄像头卡顿,画面延迟问题。参考了一些文章,都较为零零散散,因此想自己整理下分享给大家,包含了很多自己运行中出现的bug以及解决方法,具体步骤如下:
1.海康SDK下载
下载地址:
https://www.hikvision.com/cn/download_61.html
2.安装opencv
解压后的OpenCV需要将其bin路径添加到系统环境变量path下;
3.安装Swig
下载连接:
http://www.swig.org/download.html

将 E:\App_install\swigwin-3.0.12路径添加到系统环境变量path中;
4、下载boost库
下载地址:
https://www.boost.org/users/download/
我选择的是 boost_1_70_0.zip (因为本文主要是将win10环境下的), 将其解压到待会工程需要用的路径下即可;此处随意解压到任意路径即可,待会会将解压后的文件夹拷贝到后面要说的路径下即可~
5、下载OpenCV-swig接口文件
下载地址:
https://github.com/renatoGarcia/opencv-swig
将其下载解压:
我们主要会用到其目录下lib文件夹中的文件opencv文件夹和opencv.i接口文件(下文会提到如何使用,暂且解压就行)

-
使用swig编译生成python和c++数据交换需要的.py和.cxx文件
复制以下三个文件,保存到一个文件夹下,我将以下文件都放在 HicVision_python_SDK 新建文件夹下了
HKIPcamera.h
#include <opencv2/opencv.hpp>
using namespace cv;
void init(char* ip, char* usr, char* password);
Mat getframe();
void release();
HKIPcamera.cpp
#include <opencv\cv.h>
#include <opencv\highgui.h>
#include <opencv2\opencv.hpp>
#include <iostream>
#include <time.h>
#include <cstdio>
#include <cstring>
#include <iostream>
#include <windows.h>
#include "HCNetSDK.h"
#include "plaympeg4.h"
#define USECOLOR 1
using namespace cv;
using namespace std;
int iPicNum = 0;
LONG nPort = -1;
HWND hWnd = NULL;
CRITICAL_SECTION g_cs_frameList;
list<Mat> g_frameList;
LONG lUserID;
NET_DVR_DEVICEINFO_V30 struDeviceInfo;
HANDLE hThread;
LONG lRealPlayHandle = -1;
void yv12toYUV(char *outYuv, char *inYv12, int width, int height, int widthStep)
int col, row;
unsigned int Y, U, V;
int tmp;
int idx;
for (row = 0; row < height; row++)
idx = row * widthStep;
int rowptr = row * width;
for (col = 0; col < width; col++)
tmp = (row / 2)*(width / 2) + (col / 2);
Y = (unsigned int)inYv12[row*width + col];
U = (unsigned int)inYv12[width*height + width * height / 4 + tmp];
V = (unsigned int)inYv12[width*height + tmp];
outYuv[idx + col * 3] = Y;
outYuv[idx + col * 3 + 1] = U;
outYuv[idx + col * 3 + 2] = V;
void CALLBACK DecCBFun(long nPort, char * pBuf, long nSize, FRAME_INFO * pFrameInfo, long nReserved1, long nReserved2)
long lFrameType = pFrameInfo->nType;
if (lFrameType == T_YV12)
#if USECOLOR
static IplImage* pImgYCrCb = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 3);
yv12toYUV(pImgYCrCb->imageData, pBuf, pFrameInfo->nWidth, pFrameInfo->nHeight, pImgYCrCb->widthStep);
static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 3);
cvCvtColor(pImgYCrCb, pImg, CV_YCrCb2RGB);
#else
static IplImage* pImg = cvCreateImage(cvSize(pFrameInfo->nWidth, pFrameInfo->nHeight), 8, 1);
memcpy(pImg->imageData, pBuf, pFrameInfo->nWidth*pFrameInfo->nHeight);
#endif
EnterCriticalSection(&g_cs_frameList);
g_frameList.push_back(cv::cvarrToMat(pImg));
LeaveCriticalSection(&g_cs_frameList);
void CALLBACK fRealDataCallBack(LONG lRealHandle, DWORD dwDataType, BYTE *pBuffer, DWORD dwBufSize, void *pUser)
DWORD dRet;
switch (dwDataType)
case NET_DVR_SYSHEAD:
if (!PlayM4_GetPort(&nPort))
break;
if (dwBufSize > 0)
if (!PlayM4_OpenStream(nPort, pBuffer, dwBufSize, 1024 * 1024))
dRet = PlayM4_GetLastError(nPort);
break;
if (!PlayM4_SetDecCallBack(nPort, DecCBFun))
dRet = PlayM4_GetLastError(nPort);
break;
if (!PlayM4_Play(nPort, hWnd))
dRet = PlayM4_GetLastError(nPort);
break;
break;
case NET_DVR_STREAMDATA:
if (dwBufSize > 0 && nPort != -1)
BOOL inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
while (!inData)
Sleep(10);
inData = PlayM4_InputData(nPort, pBuffer, dwBufSize);
OutputDebugString(L"PlayM4_InputData failed \n");
break;
void CALLBACK g_ExceptionCallBack(DWORD dwType, LONG lUserID, LONG lHandle, void *pUser)
char tempbuf[256] = { 0 };
switch (dwType)
case EXCEPTION_RECONNECT:
printf("----------reconnect--------%d\n", time(NULL));
break;
default:
break;
bool OpenCamera(char* ip, char* usr, char* password)
lUserID = NET_DVR_Login_V30(ip, 8000, usr, password, &struDeviceInfo);
if (lUserID == 0)
cout << "Log in success!" << endl;
return TRUE;
printf("Login error, %d\n", NET_DVR_GetLastError());
NET_DVR_Cleanup();
return FALSE;
DWORD WINAPI ReadCamera(LPVOID IpParameter)
NET_DVR_SetExceptionCallBack_V30(0, NULL, g_ExceptionCallBack, NULL);
NET_DVR_CLIENTINFO ClientInfo;
ClientInfo.lChannel = 1;
ClientInfo.hPlayWnd = NULL;
ClientInfo.lLinkMode = 1;
ClientInfo.sMultiCastIP = NULL;
LONG lRealPlayHandle;
lRealPlayHandle = NET_DVR_RealPlay_V30(lUserID, &ClientInfo, fRealDataCallBack, NULL, TRUE);
if (lRealPlayHandle < 0)
printf("NET_DVR_RealPlay_V30 failed! Error number: %d\n", NET_DVR_GetLastError());
return -1;
cout << "码流回调成功!" << endl;
Sleep(-1);
if (!NET_DVR_StopRealPlay(lRealPlayHandle))
printf("NET_DVR_StopRealPlay error! Error number: %d\n", NET_DVR_GetLastError());
return 0;
NET_DVR_Logout(lUserID);
NET_DVR_Cleanup();
return 0;
void init(char* ip, char* usr, char* password) {
NET_DVR_Init();
NET_DVR_SetConnectTime(2000, 1);
NET_DVR_SetReconnect(10000, true);
OpenCamera(ip, usr, password);
InitializeCriticalSection(&g_cs_frameList);
hThread = ::CreateThread(NULL, 0, ReadCamera, NULL, 0, 0);
Mat getframe() {
Mat frame1;
EnterCriticalSection(&g_cs_frameList);
while (!g_frameList.size()) {
LeaveCriticalSection(&g_cs_frameList);
EnterCriticalSection(&g_cs_frameList);
list<Mat>::iterator it;
it = g_frameList.end();
it--;
Mat dbgframe = (*(it));
(*g_frameList.begin()).copyTo(frame1);
frame1 = dbgframe;
g_frameList.pop_front();
g_frameList.clear();
LeaveCriticalSection(&g_cs_frameList);
return(frame1);
void release() {
::CloseHandle(hThread);
NET_DVR_StopRealPlay(lRealPlayHandle);
NET_DVR_Logout(lUserID);
NET_DVR_Cleanup();
HKIPcamera.i
%module HKIPcamera
%include <opencv/mat.i>
%cv_mat__instantiate_defaults
%header %{
#include "HKIPcamera.h"
%include "HKIPcamera.h"
将上面提及的opencv-swig-master\lib下的opencv文件夹和opencv.i 这两个文件复制到 HicVision_python_SDK文件夹下,然后将解压的boost_1_70_0文件夹也一并拷贝到这个目录下了(其中test文件夹我也一并拷贝过来了,不确定有没有用到,理论上用不上,放着不管了~)

使用如下指令:
E:\Win32-MFC-Projects\HicVision_python_SDK>swig -IE:/App_install/opencv3_4_2/opencv/build/include -python -c++ HKIPcamera.i
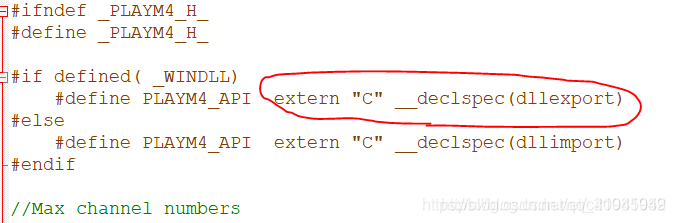
2、修改海康SDK下的plaympeg4.h文件
该文件在CH-HCNetSDKV6.0.2.35_build20190411_Win64 \ include 目录下:
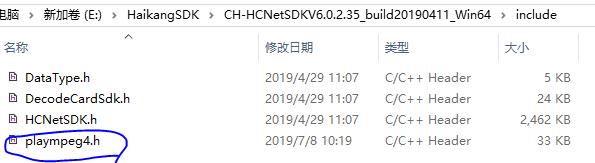
extern “C” __declspec(dllexport)的"C"和__之间需要增加空格,否则会导致编译报错。即:
3、用VS2015编译生成动态链接库文件
新建win32控制台应用 工程,取消选择"安全开发生命周期(SDL)检测";
应用程序设置页参考如下:

在资源方案管理器页将如下图所示的文件导入,即将上文提到的生成的文件拷贝到项目中(我这边起名为HKIPcamera项目名,建议一致);

我编译的平台是release x64下的,因此将配置该平台环境的属性页
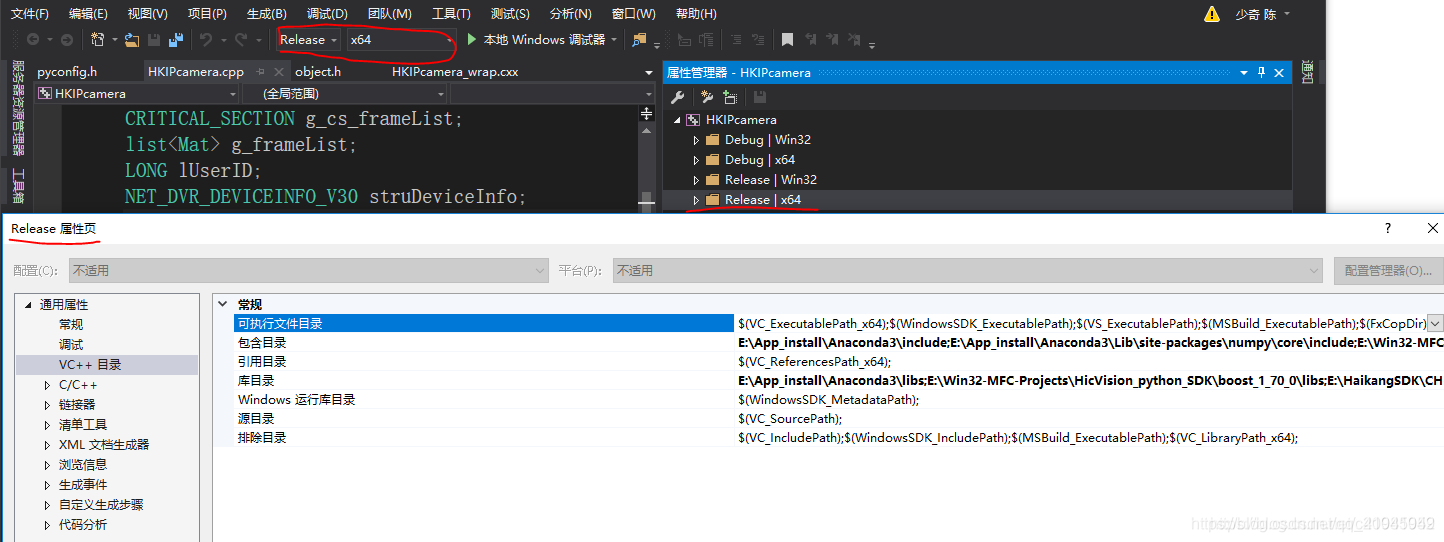
其中VC++目录->包含目录中添加如下头文件路径:(请根据实际安装位置补全其全路径名称,我这边省去了安装路径名了~)
Anaconda3\include
Anaconda3\Lib\site-packages\numpy\core\include
HicVision_python_SDK\boost_1_70_0
CH-HCNetSDKV6.0.2.35_build20190411_Win64\include
opencv3_4_2\opencv\build\include\opencv2
opencv3_4_2\opencv\build\include\opencv
opencv3_4_2\opencv\build\include
其中VC++目录->库目录中添加如下库的路径:(自行补全实际安装全路径名)
Anaconda3\libs
HicVision_python_SDK\boost_1_70_0\libs
CH-HCNetSDKV6.0.2.35_build20190411_Win64\lib
CH-HCNetSDKV6.0.2.35_build20190411_Win64\lib\HCNetSDKCom
opencv3_4_2\opencv\build\x64\vc14\lib
预处理器->预处理器定义中内容如下:
WIN32
NDEBUG
_CONSULE
_CRT_SECURE_NO_WARNINGS

且在通用属性->常规->字符集中选择使用多字节字符集(这个依据实际错误情况来修改,我是遇到这方面的问题,此处仅做补充)
C/C+±>代码生成->运行库选的是多线程DLL(/MD)
链接器->输入->附加依赖项中添加: opencv_world342.lib (release下是这个,debug下需要改为opencv_world342d.lib)
HCNetSDK.lib
GdiPlus.lib
HCAlarm.lib
HCCore.lib
HCGeneralCfgMgr.lib
HCPreview.lib
PlayCtrl.lib
完成以上步骤后,右键工程项目名选择生成,之后会在工程x64文件夹下的Release文件夹下生成.dll和.lib文件如下(红色):

复制一份 HKIPcamera.dll 文件并重命名为 _HKIPcamera.pyd到该目录下,并将海康SDK中的 HCNetSDKCom 文件夹拷贝过来(这个步骤很重要!!!!),以及将上文中用swig生成的HKIPcamera.py 也复制过来(如上图蓝色)
最后编写了个test.py也放在上图目录下,其内容如下(主要用来检测是否编译成功了):
import HKIPcamera
import time
import numpy as np
import matplotlib.pyplot as plt
import cv2
ip = str('10.167.93.111')
name = str('admin')
pw = str('abcd1234')
HKIPcamera.init(ip, name, pw)
while(True):
t = time.time()
fram = HKIPcamera.getframe()
t2 = time.time()
cv2.imshow('123', np.array(fram))
cv2.waitKey(1)
print(t2-t)
time.sleep(0.1)
HKIPcamera.release()
time.sleep(5)
HKIPcamera.init(ip, name, pw)
在anaconda的prompt控制台下运行该test.py,会看到python调用SDK的实时画面,其延迟性同网页预览版差不多。但比rtsp流读取的效果好很多~
至此成功!
一.无法打开 python35_d.lib 的问题
参考:https://blog.csdn.net/zhuxukang/article/details/79614335
在Anaconda3->libs目录下只有python35.lib,即我们安装的python3.5是非调试版,因此编译时最好用release版的,解决方法1:将python35.lib复制一份并重命名为python35_d.lib保存到相同目录下(我试了不可行,可能你可尝试);
解决方法2:在Anaconda3->include下找到pyconfig.h文件,对其做如下修改:
注释掉(358-360的内容);更改315行内容;

二. 不能将参数 1 从“const char [12]”转换为“const wchar_t ”
报错的位置是下图,网上https://blog.csdn.net/yeahoodfox/article/details/42172729 的解决方式是在属性页中设置字符集为未设置,可无法解决我的问题,索性我将其注释掉了~没问题。

三.AttributeError: module ‘HKIPcamera’ has no attribute 'init’
在运行test.py时你会遇到这个问题,那么你需要将SDK的HCNetSDKCom 文件夹拷贝到test.py所在文件路径下。
四:1>pythonIniti.obj : error LNK2019: 无法解析的外部符号 __imp___Py_NegativeRefcount,该符号在函数 “public: __thiscall boost::python::api::object_base::~object_base(void)” (??1object_base@api@python@boost@@QAE@XZ) 中被引用
1>pythonIniti.obj : error LNK2001: 无法解析的外部符号 __imp___Py_RefTotal

解决方法是:修改头文件object.h,注释掉第56行:注释掉pyconfig.h中的define Py_DEBUG
(参考:https://www.jb51.net/article/108588.htm)

————————————————
版权声明:本文为CSDN博主「ciky奇」的原创文章。
原文链接:https://blog.csdn.net/c20081052/article/details/95082377
防止一些意外,故转载自:Python调用海康威视网络相机之——python调用海康威视C++的SDK运行环境Win10系统,64位,Anaconda3python 3.5.5(基于anaconda环境)opencv 3.4.2 (早前就已经安装了,本文不会讲如何安装)Visual Studio 2015硬件:DS-2CD3T56DWD-I5相机SDK: CH-HCNetSDKV6.0.2.35_build20190411_Win64准备工作之前常常采用python来读取usb摄像头,因为
你好!这是一段使用 Python 控制海康威视相机的示例代码:
import requests# 海康威视相机的 IP 地址
camera_ip = '192.168.1.10'
# 登录相机
url = f'http://{camera_ip}/ISAPI/Security/userCheck'
data = {
'username': 'admin',
'password':...
Visual Studio 2017
硬件:DS-2CD3T86FWDV2-I5S
相机SDK:CH-HCNetSDKV6.1.6.45_build20210302_win64
首先,海康网络相机的读取和工业相机不是同一个SDK包,工业相机的SDK包去海康机器人下载,网络相机的SDK包去海康威视下载。工业相机控制软件MVS目录下有python SDK包使用示例,非
通过python调用海康威视工业摄像头并进行图像存储问题(数据流获取问题未能解决)
先说情况,本人是做视觉检测的需要高倍率摄像头进行实时检测,也就是需要深度学习进行图片数据处理,但是这个又是python来进行分析,而海康威视主要程序代码是以C为主的,传过来的数据我也尝试的去解析都是不能转化成python的BGR图像。
具体参照了:通过cv2调用海康威视摄像头,但这个不能调用工业摄像头,通过官方给一个400什么软件要激活摄像头,可是却并不能检测到工业摄像头,通过mvs软件调用到摄像头地址进行测试也无法获取到摄
这里写自定义目录标题本文参考以下博文加自己的实践,发现有些步骤是不必要的,例如不需要为opencv等第三方库指定路径运行环境:准备工作1、海康SDK下载2、下载安装vcpkg3、安装Swig4、下载OpenCV-swig接口文件
本文参考以下博文加自己的实践,发现有些步骤是不必要的,例如不需要为opencv等第三方库指定路径
https://blog.csdn.net/c20081052/article/details/95082377
https://www.ryannn.com/archives/hi
最近调一个红外摄像头,后续做红外视频检测和识别。厂家给的
SDK是
C++写的,也不好做二次开发,只好用
python再做一次封装。先记录下reference,调试结束后再来整理总结。之前没搞过这种,慢慢摸索,还有点意思。
https://www.cnblogs.com/pyse/p/8590829.html
https://blog.csdn.net/maybe_lee/article/details/78586198
使用python获取海康威视网络相机图像 测试文件为test.py
按照网上的一些教程完成了操作https://blog.csdn.net/c20081052/article/details/95082377#comments
后续遇到了封装的python模块不能导入的错误 解决方法是把所有相关的dll lib全部拷贝到测试文件所在文件夹内,具体请下载资源。
不保证百分百 跨电脑运行不出问题
安装 opencv3.4.5.20 pip3 install opencv-python==3.4.5.20 -i https://pypi.tuna.tsinghua.edu.cn/simple
文章目录1. 首先,我们需要一个工具包来协助我们完成python打包的任务2. 之后封装好你的项目api3.编写setup.py文件,用于安装Demo包4. 创建一个简单的包5. 安装和使用SDK
转载地址https://blog.csdn.net/ytp552200ytp/article/details/88532951?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-1.n
机器人上使用某型号的热成像仪,厂家提供了C++接口的SDK,而我们的主程序是python,因此参考《Python调用C++程序的几种方法》,利用boost的方式实现调用(该博文不具有通用性,目的是记录过程)
在TX2上完成热成像仪的采集工作,因此首先给厂家提供TX2的交叉编译工具《NVIDIA TX2交叉编译工具》,如图所示,第一个表示交叉编译工具,第二个表示厂家返回的SDK
解压后, 在...
### 回答1:
海康威视热成像相机是一种高性能的红外热成像设备,它能够以非接触的方式获取物体表面的热量分布情况,并将其转化为数字信号输出,方便用户进行后续处理和分析。如果想要使用Python语言来调用海康威视热成像相机的温度数据矩阵,可以按照以下步骤进行:
1. 安装SDK和驱动程序:在使用之前,需要先安装好海康威视的SDK和相机驱动程序,并进行相关的配置和设置,以保证系统能够正确地识别和连接到相机。
2. 连接到相机:使用Python脚本连接到相机,建立通信通道。通过相机SDK提供的接口函数,可以获取到相机的温度数据矩阵。
3. 数据处理和分析:获取到温度数据后,需要进行一些数据处理和分析工作,以提取出有用的信息和结果。例如,可以通过计算每个像素点的平均温度值或温度变化率,来分析目标物体的热量分布情况和变化趋势。
4. 结果呈现和输出:最后,可以将分析得到的结果以图形或表格等形式呈现出来,供用户进行查看和参考。
需要注意的是,以上步骤中具体的代码和函数调用方式会根据不同的相机型号和SDK版本而有所不同,因此在使用之前需要先查看相应的文档和说明。同时,还需要熟悉Python语言的基础知识和相关的科学计算库,以便进行数据处理和分析。
### 回答2:
Python是一个强大的编程语言,能够支持多种各种各样的编程任务。其中一个任务就是与相机交互,通过相机采集数据后进行处理。海康威视热成像相机是一种基于红外技术的相机,它可以获取物体表面的温度数据矩阵,这对于温度检测和热成像分析等方面的应用都非常有用。
要调用海康威视相机,我们需要使用Python的SDK库。这个库包含了所有与海康威视相机交互所需的函数和方法。要获取温度数据矩阵,首先需要连接到相机。连接相机的方法可以使用Python SDK中的函数,通常需要提供相机的IP地址或者序列号。
一旦我们连接到相机,我们就可以获取温度数据矩阵。获取温度数据矩阵的方法也在Python SDK中提供。一般情况下,我们可以使用一个循环来获取多张图像,从而获得一个连续的视频流。对于每张图像,我们可以使用提供的函数来获取温度数据矩阵。这个矩阵通常是一个像素大小为320x240的数组,每个数组元素表示一个像素的温度值。
获取温度数据矩阵后,我们可以使用它进行各种分析和处理。例如,我们可以使用NumPy库来对矩阵进行数学运算。我们还可以使用Matplotlib库来可视化矩阵,以便更好地理解和分析数据。
总的来说,使用Python调用海康威视热成像相机的温度数据矩阵需要以下步骤:连接相机,获取温度数据矩阵,对矩阵进行分析和处理。Python SDK提供了所有必要的函数和方法来执行这些任务。
### 回答3:
海康威视是世界领先的视频监控解决方案供应商之一,其热成像相机是一种能够对人或物体进行红外热成像检测的专业设备,可广泛应用于安防监控、工业生产等领域。而Python是一种流行的编程语言,具有简洁明了的语法和强大的数据处理能力,因此,许多人希望能够使用Python调用海康威视热成像相机的温度数据矩阵。
首先,需要准备相应的开发环境和工具,包括海康威视热成像相机、SDK软件、Python编程环境等。其次,需要了解相机和SDK软件的相关API(应用程序接口),以便编写Python代码进行调用。
要调用海康威视热成像相机的温度数据矩阵,可以按照以下步骤进行:
1. 安装SDK软件并导入相关库文件:首先需要安装SDK软件,并导入相关的库文件和模块,包括海康威视热成像相机的API库、Python的图像处理库等。
2. 初始化相机:通过SDK软件提供的初始化函数,连接相机并设置相关参数,如相机连接方式、图像格式、温度单位等。
3. 获取温度数据:通过SDK软件提供的API函数,获取相机捕获的温度数据,包括热成像图像数据、温度矩阵数据等。一般情况下,可以使用相机侧面的温度数据输出接口,获取原始温度矩阵数据。
4. 处理温度数据:通过Python的图像处理库等工具,对获取到的温度数据进行处理和转换,包括图像预处理、颜色调整、坐标转换等操作。
5. 显示温度图像:将处理后的温度数据矩阵显示为图像,并加上相应的标注和注释,以便用户进行观察和分析。
总的来说,使用Python调用海康威视热成像相机的温度数据矩阵,需要一定的编程基础和相关技术知识。但是,一旦掌握了相应的API函数和工具,就可以灵活地进行数据读取、处理和可视化,实现更多的应用场景。

