


重写TensorRT版本YOLOX部署代码

前言
YOLOX
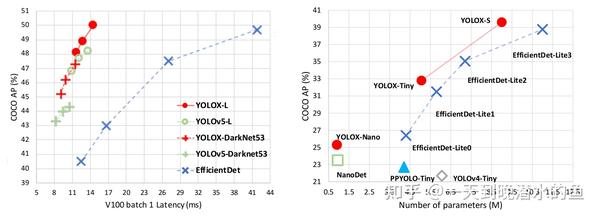
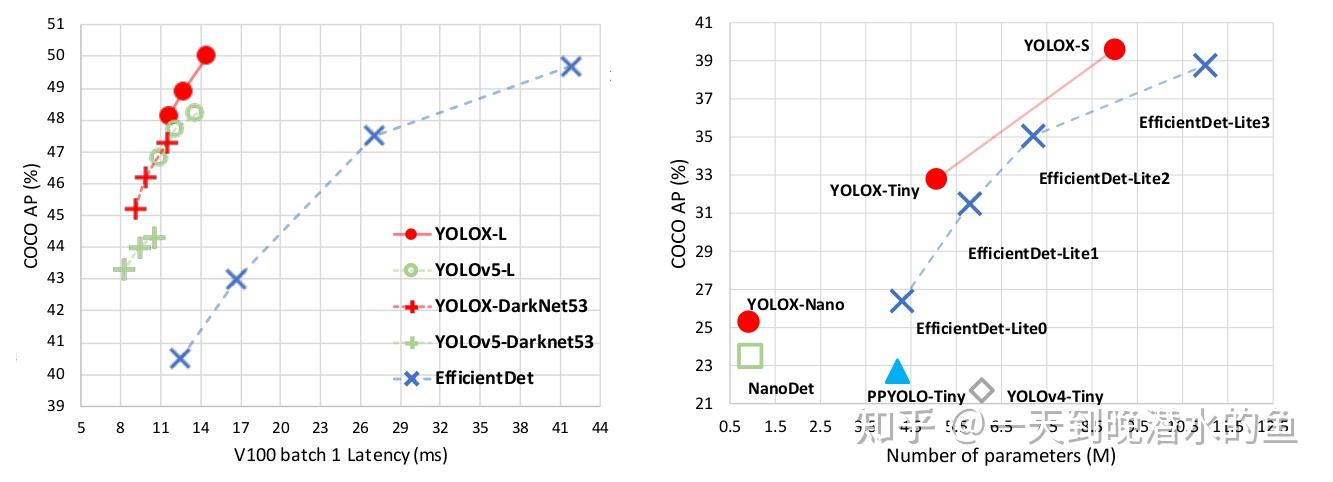
是前段时间旷视开源的一个目标检测算法,据说效果很好,这两天有空了就准备研究一下,看了论文感觉里面干货还是很多的,等后面再仔细研究研究。从论文放出的结果来看,
YOLOX
在速度和精度上应该是全面超过了之前的
YOLO
系列算法的。
比较良心的是,作者不仅开源了代码和模型,还放出了
TensorRT、OpenVINO、NCNN
等框架下的模型部署示例代码,可谓是工程人的福音。
看了
TensorRT
版本的
C++
部署示例代码,决定自己重新写一下,就当练手了。
实现过程
这里主要记录需要注意的事项和与官方示例代码不一样的地方。
1. 下载ONNX模型
ONNX
模型可以从下面的链接页面中下载:
https://github.com/Megvii-BaseDetection/YOLOX/releases/
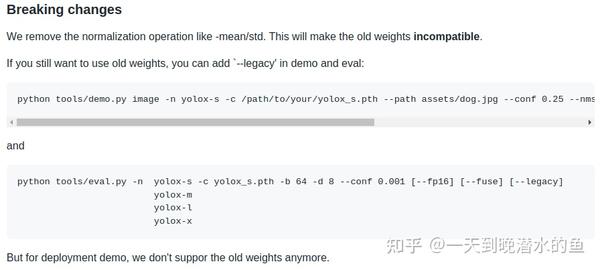
需要注意的是,我们需要下载
0.1.1pre
版本的权重,最新的代码中作者已经修改了图像预处理的方式,这会导致之前版本的
ONNX
模型权重与最新的代码不兼容,这是作者的说明:

2. TensorRT解析ONNX模型
YOLOX
官方提供的
TensorRT
版本示例代码是先通过
tools/trt.py
脚本把
ONNX
模型解析再后序列化到
model_trt.engine
文件中,然后
C++
代码再从该文件中加载模型去进行推理。这里我们可以直接在
C++
代码中去解析
ONNX
模型,然后把它序列化到
.engine
文件中,
TensorRT
解析
ONNX
模型的方法可以参考英伟达官方提供的
sampleOnnxMNIST
例程。
if (!isFileExists(engine_path)) {
std::cout << "The engine file " << engine_path
<< " has not been generated, try to generate..." << std::endl;
engine_ = SerializeToEngineFile(model_path_, engine_path);
std::cout << "Succeed to generate engine file: " << engine_path
<< std::endl;
} else {
std::cout << "Use the exists engine file: " << engine_path << std::endl;
engine_ = LoadFromEngineFile(engine_path);
这里首先判断
ONNX
模型对应的
.engine
文件是否存在,如果存在就直接从
.engine
文件中加载模型,否则就创建一个
ONNX
模型解析器去解析模型,然后把模型序列化到
.engine
文件中方便下次使用。
//把模型序列化到engine文件中
nvinfer1::IHostMemory *trtModelStream = engine->serialize();
std::stringstream gieModelStream;
gieModelStream.seekg(0, gieModelStream.beg);
gieModelStream.write(static_cast<const char *>(trtModelStream->data()),
trtModelStream->size());
std::ofstream outFile;
outFile.open(engine_path);
outFile << gieModelStream.rdbuf();
outFile.close();
3. 自动获取模型输入尺寸
官方示例代码中,默认模型的输入尺寸是
640x640
static const int INPUT_W = 640;
static const int INPUT_H = 640;
但是如果模型的输入尺寸是
416x416
或者是长宽不等的
512x416
这种尺寸,那么就还需要改代码,感觉不是很方便。其实模型的输入输出维度都可以通过
TensorRT
提供的接口获取,这样就方便根据模型解析的结果自动获取输入尺寸,然后根据这个信息去对输入图像做
resize
了。
nvinfer1::Dims input_dim = engine_->getBindingDimensions(index);
int input_size = 1;
for (int j = 0; j < input_dim.nbDims; ++j) {
input_size *= input_dim.d[j];
上面的代码中,
input_dim.d
为模型的输入尺寸,按照
NCHW
的顺序排列。
4. 图像预处理
官方示例代码中,预处理的时候是对图像做长宽等比例缩放,不足的地方再进行填充:
cv::Mat static_resize(cv::Mat& img) {
float r = std::min(INPUT_W / (img.cols*1.0), INPUT_H / (img.rows*1.0));
int unpad_w = r * img.cols;
int unpad_h = r * img.rows;
cv::Mat re(unpad_h, unpad_w, CV_8UC3);
cv::resize(img, re, re.size());
cv::Mat out(INPUT_H, INPUT_W, CV_8UC3, cv::Scalar(114, 114, 114));
re.copyTo(out(cv::Rect(0, 0, re.cols, re.rows)));
return out;
我就直接简单粗暴地
resize
了(不要学我):
cv::Mat resize_image;
cv::resize(input_image, resize_image, cv::Size(model_width_, model_height_));
两种方法的对比:




5. 后处理
后处理是对模型推理的结果进行解析,
YOLOX
是
anchor-free
的目标检测算法,解析的时候相对要简单一些。与
YOLOv3
类似,
YOLOX
还是在3个尺度上去做检测,每一层特征图上的单元格只预测一个框,每个单元格输出的内容是
x,y,w,h,objectness
这5个内容再加上每个类别的概率。可以用
Netron
看一下模型后面几层的结构:
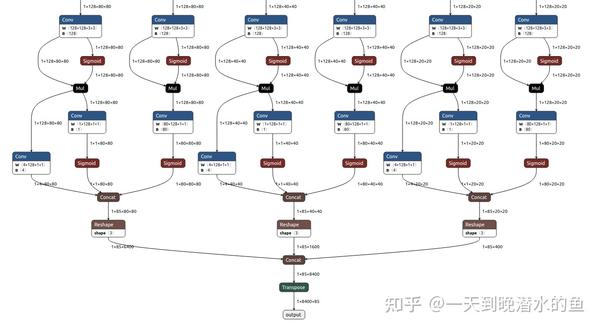
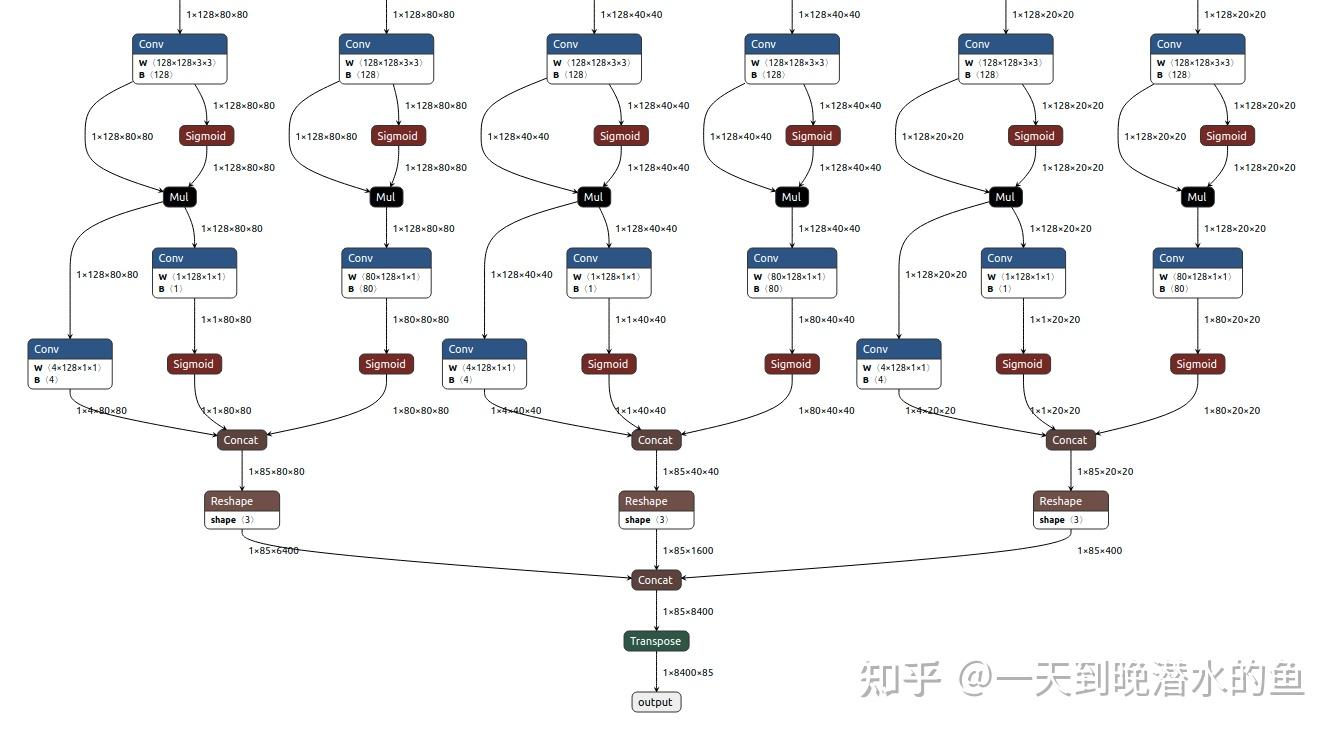
可以看到,如果模型输入尺寸为
640x640
,分别降采样
8,16,32
倍后得到的特征图尺寸分别为
80x80,40x40,20x20
,
COCO
数据集有
80
个类别那么每个特征图的单元格输出的数据长度为
5+80=85
,3个特征图上的结果最终会
concat
到一起进行输出,所以最终输出的数据维度为
(80x80+40x40+20x20)x85=8400x85
。
官方示例代码中用了好几个函数做后处理,感觉有点繁琐,于是我重写了这部分的代码:
const std::vector<int> strides = {8, 16, 32};
float *ptr = const_cast<float *>(output);
for (std::size_t i = 0; i < strides.size(); ++i) {
const int stride = strides.at(i);
const int grid_width = model_width_ / stride;
const int grid_height = model_height_ / stride;
const int grid_size = grid_width * grid_height;
for (int j = 0; j < grid_size; ++j) {
const int row = j / grid_width;
const int col = j % grid_width;
const int base_pos = j * (kNumClasses + 5);
const int class_pos = base_pos + 5;
const float objectness = ptr[base_pos + 4];
const int label =
std::max_element(ptr + class_pos, ptr + class_pos + kNumClasses) -
(ptr + class_pos);
const float confidence = (*(ptr + class_pos + label)) * objectness;
if (confidence > confidence_thresh) {
const float x = (ptr[base_pos + 0] + col) * stride / width_scale;
const float y = (ptr[base_pos + 1] + row) * stride / height_scale;
const float w = std::exp(ptr[base_pos + 2]) * stride / width_scale;
const float h = std::exp(ptr[base_pos + 3]) * stride / height_scale;
Object obj;
obj.box.x = x - w * 0.5f;
obj.box.y = y - h * 0.5f;
obj.box.width = w;
obj.box.height = h;
obj.label = label;
obj.confidence = confidence;