工业相机我买的是海康威视的,具体的参数如下:

工业相机资料:
https://c109334.hi1718.com/news/201831317343619.html

镜头资料:
https://c109334.hi1718.com/news/2018319114719513.html
VS2019+Opencv4.4+QT5.13.2+海康威视SDKMVS_SDK_V3_2_0
①VS工程配置Opencv(参考如下博客)
Opencv4.4文件:
链接:
https://pan.baidu.com/s/1EpOfbkrzkpLyX14w7vINUw
提取码:7qxl
【opencv4.3.0教程】01之opencv介绍与配置
https://blog.csdn.net/shuiyixin/article/details/105998661
②VS中安装Qt(配置步骤参考下面两个博客)
Qt相关文件:
链接:
https://pan.baidu.com/s/1r0gISpfQFuowwA7q2BL3og
提取码:gll1
https://blog.csdn.net/visual_eagle/article/details/106236109
Windows安装qt与VS2019添加QT工具过程
https://blog.csdn.net/ljb9854/article/details/102600931
③安装海康威视提供的MVS客户端操作,我是安装了然后直接就能打开了,若不能打开就设置一下电脑与相机的IP,MVS_SDK_V3_2_0_VC90_Runtime_190626文件是用来更新原来电脑上的MVS版本。
MVS文件:
链接:
https://pan.baidu.com/s/1RanOEDx-HQ4zJgBpSobAqg
提取码:d3cy
参考博客:
https://blog.csdn.net/u014779536/article/details/106577273
一开始在网上搜索相关海康威视SDK二次开发的时候,发现有很多的资料,然后就对着开始操作,自己琢磨了好久激活相机修改密码等等,发现都无济于事。后来一问客服才知道,那些是安防相机的相关资料,不是工业相机。
嗯,,,心态炸裂。。。
关于安防相机和工业相机(网络设备SDK和工业相机SDK)的区别,可以自行百度,这里提个醒防止走入误区。
安防相机买回来是需要激活重新设置密码的,工业相机买回来直接用。
这里贴出关于安防相机SDK二次开发的资料,给有需要的人做个参考。
关于安防相机的SDK相关资料下载:
https://www.hikvision.com/cn/
这些SDK和工业相机的完全不一样,都不用,网上大部分的都是海康安防相机的SDK开发资料,什么实时预览&抓图&云台控制等等。
关于安防相机的SDK开发资料:
https://blog.csdn.net/o_ha_yo_yepeng/article/details/79537452
https://blog.csdn.net/o_ha_yo_yepeng/article/details/79825648
https://www.jianshu.com/p/1368c8ea24ff
https://blog.csdn.net/qq_15029743/article/details/79733960
https://www.bilibili.com/video/BV1ui4y1t72x?t=1326
买了相机之后,问下客服要一下MVS软件,安装之后,关于软件的使用说明和IP设置说明参考如下文件,关于如何查看相机IP等等,
千兆网口工业面阵相机用户手册V3.0.1
海康威视相机IP设置说明
链接:
https://pan.baidu.com/s/11FD3GIhz5E1O5-vJ2u-_tA
提取码:n8oa
海康威视工业相机官网,里面有关于工业相机的介绍及客户端MVS软件等等。
https://www.hikrobotics.com/
①《海康威视工业相机SDK二次开发》这篇是MFC的,且官方提供的界面功能软件都是基于MFC的,配置好环境可以直接打开使用。
https://blog.csdn.net/weixin_47364204/article/details/108537518
②《C++调用海康相机SDK采集图像(C++\QT Creator\OpenCV\线程\接口)》
这篇是基于QTCreater的,没有在VS环境中,源码我下载下来了,给有需要的人。
链接:
https://pan.baidu.com/s/1FsJg1hDCBdoJ_8hye6j1rw
提取码:z94k
https://blog.csdn.net/biggestcherry/article/details/106154321
PS:不管运行海康威视的哪个例程,都需要先配置下环境
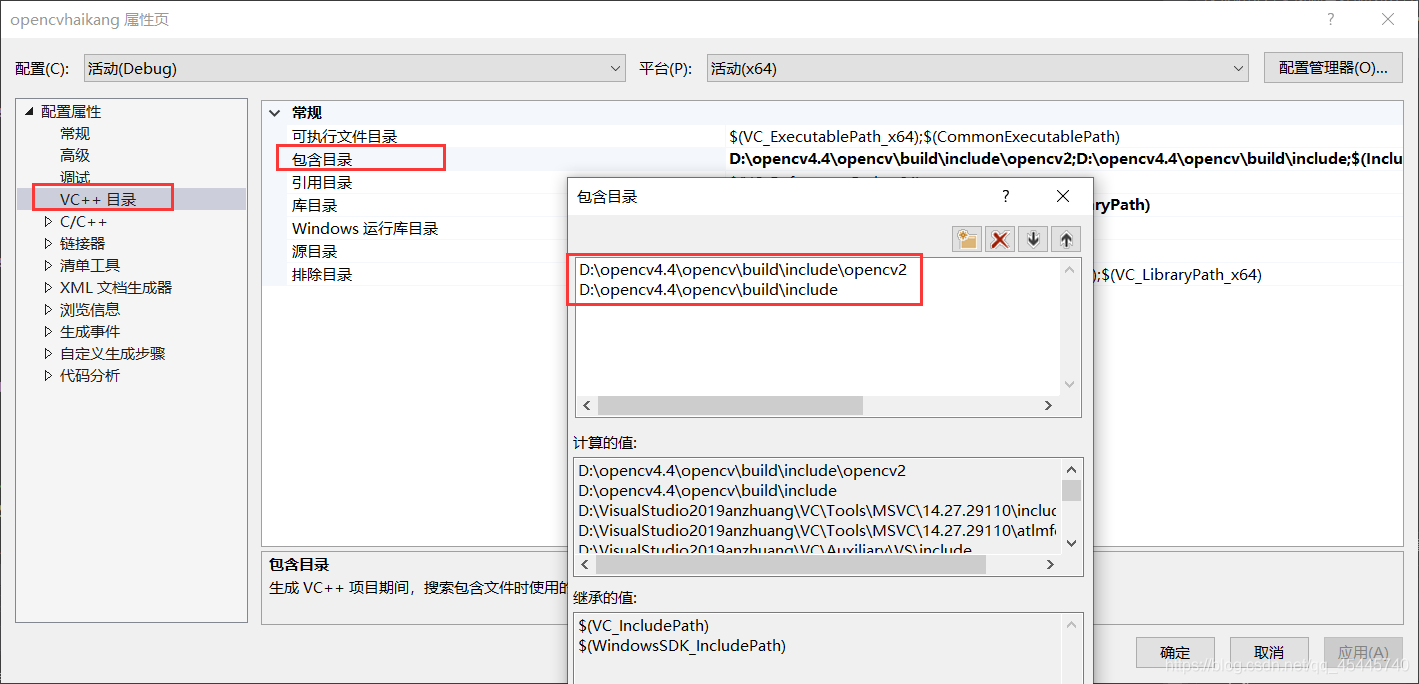
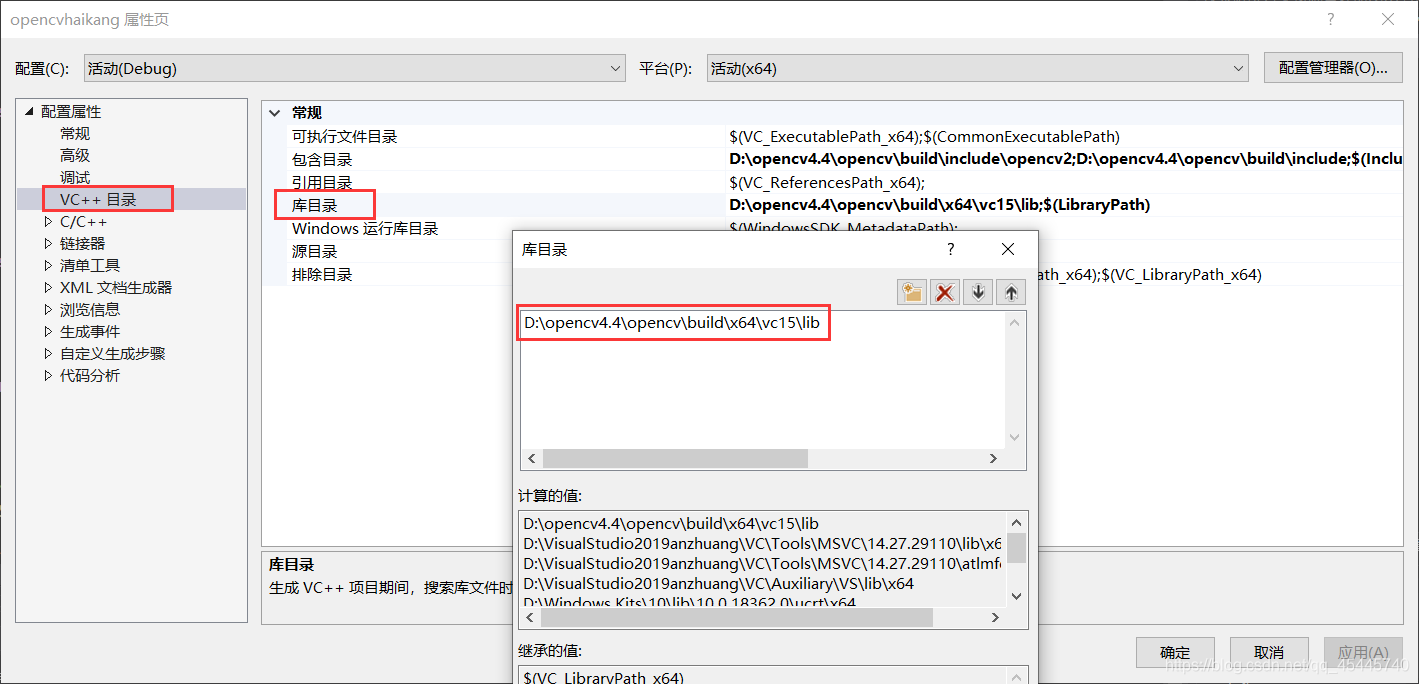
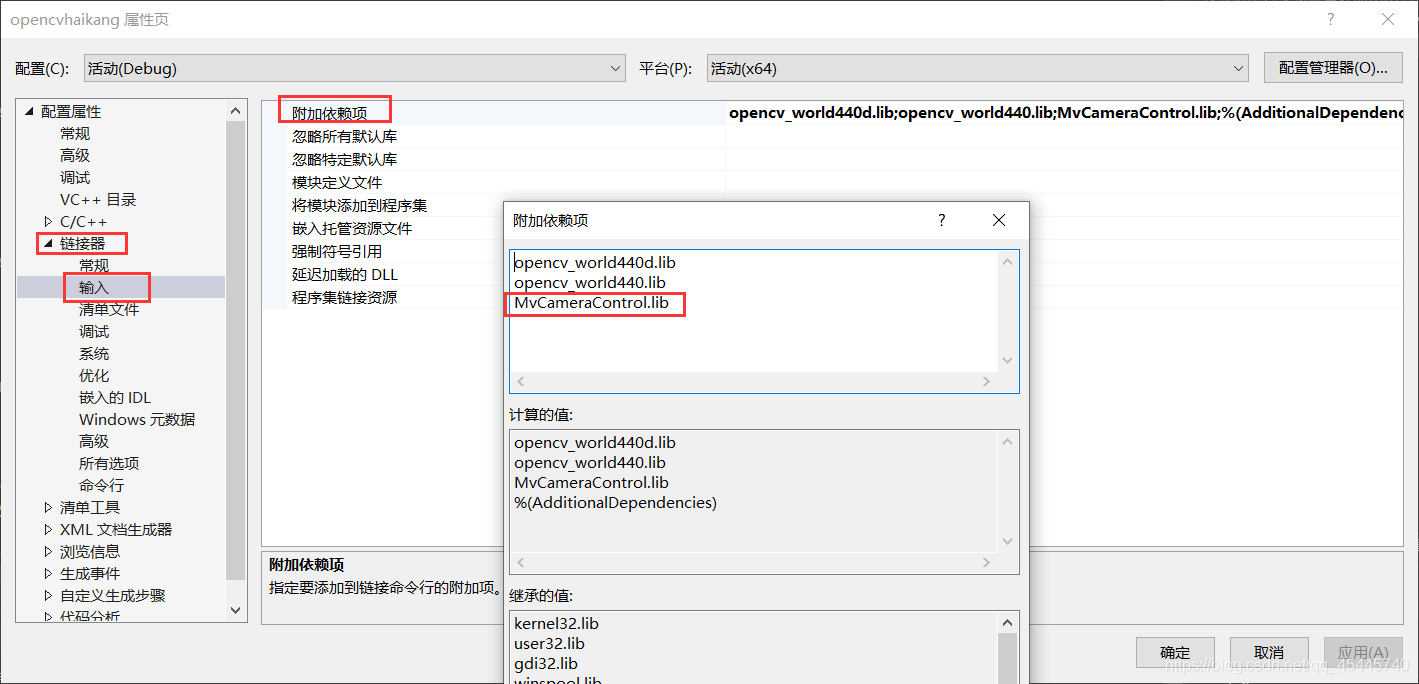
在VS项目中配置opencv和mvs的动态链接库等(用到Opencv的话)
①在VS中配置Opencv

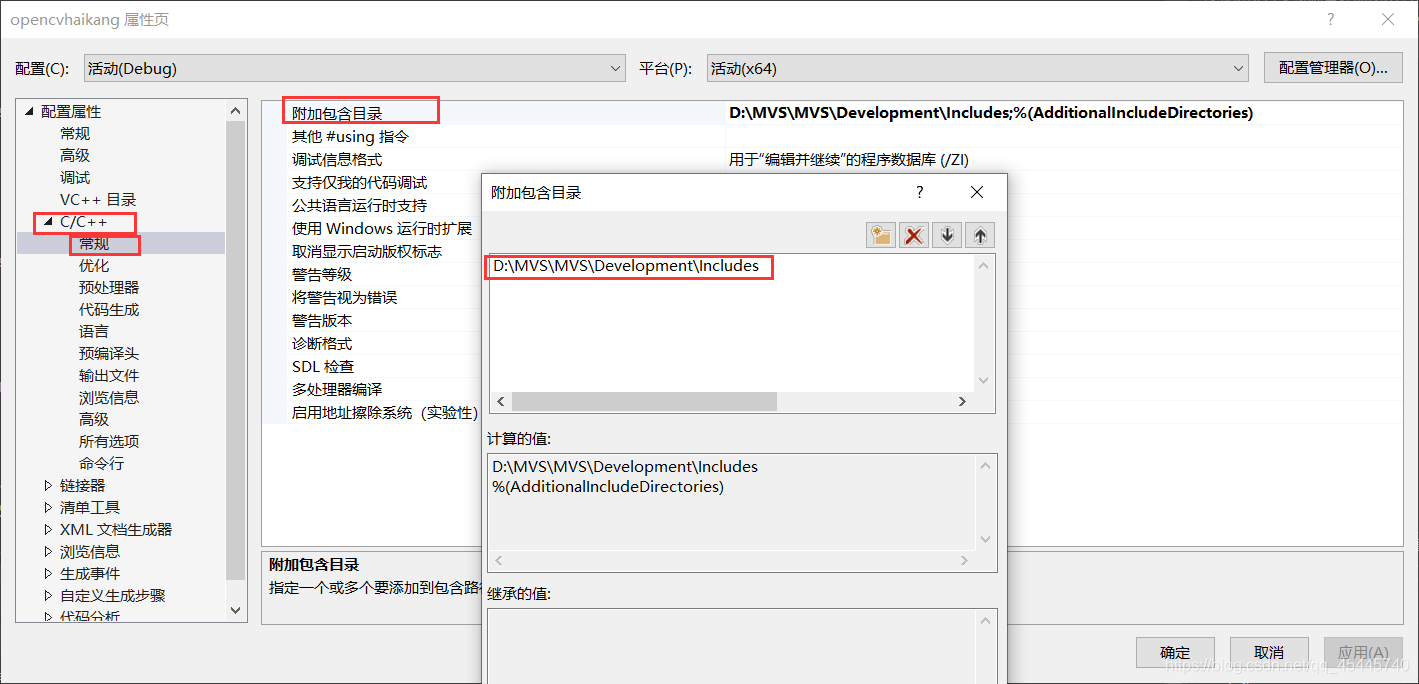
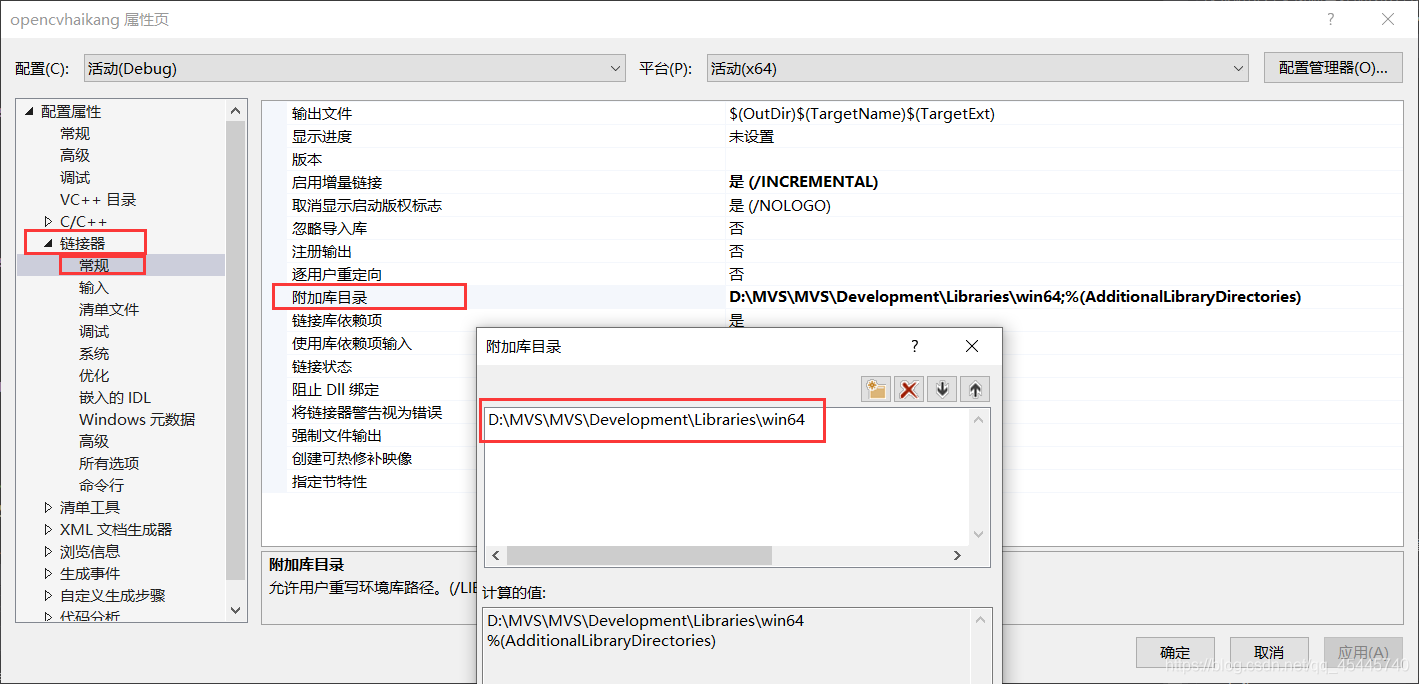
②在VS中配置MVS

功能
:通过ip地址连接相机
该示例程序说明了如何通过ip地址连接网口相机。通过输入需要连接的相机ip(Camera Ip)和相机对应的网卡ip(Export Ip)来连接相机,输入的格式为xx.xx.xx.xx。
修改的地方:
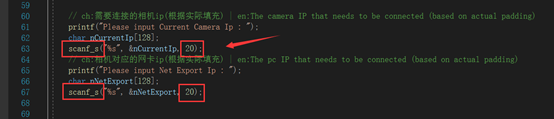
一开始官方例程中的scanf会报错说这个函数不安全,这不是错误但在高版本VS下会认为这是个错误,解决方法有二:在项目设置中增加一行预处理定义可以自行百度。或者选择修改为scanf_s。
我选择改成scanf_s,且后面还要加个参数20,表示输入的最大字符数大小,ip地址加上三个点是15个字符,这里填个20。
参考:
https://baike.baidu.com/item/scanf_s/443572?fr=aladdin
修改后的源码如下:
#include <stdio.h>
#include <Windows.h>
#include <process.h>
#include <conio.h>
#include "MvCameraControl.h"
bool g_bExit = false;
unsigned int g_nPayloadSize = 0;
void WaitForKeyPress(void)
while (!_kbhit())
Sleep(10);
_getch();
static unsigned int __stdcall WorkThread(void* pUser)
int nRet = MV_OK;
MV_FRAME_OUT_INFO_EX stImageInfo = { 0 };
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
unsigned char* pData = (unsigned char*)malloc(sizeof(unsigned char) * (g_nPayloadSize));
unsigned int nDataSize = g_nPayloadSize;
while (1)
nRet = MV_CC_GetOneFrameTimeout(pUser, pData, nDataSize, &stImageInfo, 1000);
if (nRet == MV_OK)
printf("Get One Frame: Width[%d], Height[%d], nFrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
printf("No data[0x%x]\n", nRet);
break;
if (g_bExit)
break;
free(pData);
return 0;
int main()
int nRet = MV_OK;
void* handle = NULL;
MV_CC_DEVICE_INFO stDevInfo = { 0 };
MV_GIGE_DEVICE_INFO stGigEDev = { 0 };
printf("Please input Current Camera Ip : ");
char nCurrentIp[128];
scanf_s("%s", &nCurrentIp, 20);
printf("Please input Net Export Ip : ");
char nNetExport[128];
scanf_s("%s", &nNetExport, 20);
unsigned int nIp1, nIp2, nIp3, nIp4, nIp;
sscanf_s(nCurrentIp, "%d.%d.%d.%d", &nIp1, &nIp2, &nIp3, &nIp4);
nIp = (nIp1 << 24) | (nIp2 << 16) | (nIp3 << 8) | nIp4;
stGigEDev.nCurrentIp = nIp;
sscanf_s(nNetExport, "%d.%d.%d.%d", &nIp1, &nIp2, &nIp3, &nIp4);
nIp = (nIp1 << 24) | (nIp2 << 16) | (nIp3 << 8) | nIp4;
stGigEDev.nNetExport = nIp;
stDevInfo.nTLayerType = MV_GIGE_DEVICE;
stDevInfo.SpecialInfo.stGigEInfo = stGigEDev;
nRet = MV_CC_CreateHandle(&handle, &stDevInfo);
if (MV_OK != nRet)
printf("Create Handle fail! nRet[0x%x]\n", nRet);
break;
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
if (stDevInfo.nTLayerType == MV_GIGE_DEVICE)
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (nRet != MV_OK)
printf("Warning: Set Packet Size fail nRet [0x%x]!", nRet);
printf("Warning: Get Packet Size fail nRet [0x%x]!", nPacketSize);
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", MV_TRIGGER_MODE_OFF);
if (MV_OK != nRet)
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
g_nPayloadSize = stParam.nCurValue;
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
unsigned int nThreadID = 0;
void* hThreadHandle = (void*)_beginthreadex(NULL, 0, WorkThread, handle, 0, &nThreadID);
if (NULL == hThreadHandle)
break;
printf("Press a key to stop grabbing.\n");
WaitForKeyPress();
g_bExit = true;
Sleep(1000);
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
printf("Close Device fail! nRet [0x%x]\n", nRet);
break;
nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
printf("Destroy Handle fail! nRet [0x%x]\n", nRet);
break;
handle = NULL;
} while (0);
if (nRet != MV_OK)
if (handle != NULL)
MV_CC_DestroyHandle(handle);
handle = NULL;
printf("Press a key to exit.\n");
WaitForKeyPress();
return 0;
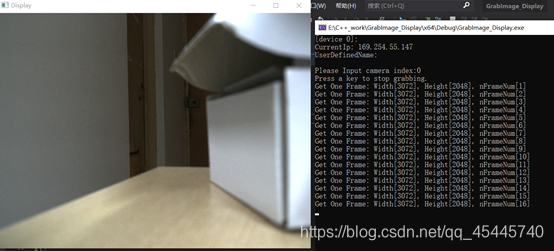
运行效果:
将工业相机接上电源和连接电脑,通过打开MVS客户端软件,知道你电脑网口的IP地址和工业相机的IP地址:


表示相机正在采集中。。。

功能:图像采集并显示
该示例程序演示如何取图并显示取到的每一帧图像。
修改的地方:
一开始官方例程中会报错"const char"类型的实参与"LPCWSTR"类型的形参不兼容和不能将"const char"类型的值分配到"LPCWSTR"类型的实体,解决办法如下:
项目——项目属性——常规——项目默认值——字符集,把字符集设为未设置,确定。

源码如下:
#include <stdio.h>
#include <process.h>
#include <conio.h>
#include "windows.h"
#include "MvCameraControl.h"
HWND g_hwnd = NULL;
bool g_bExit = false;
unsigned int g_nPayloadSize = 0;
void WaitForKeyPress(void)
while (!_kbhit())
Sleep(10);
_getch();
bool PrintDeviceInfo(MV_CC_DEVICE_INFO* pstMVDevInfo)
if (NULL == pstMVDevInfo)
printf("The Pointer of pstMVDevInfo is NULL!\n");
return false;
if (pstMVDevInfo->nTLayerType == MV_GIGE_DEVICE)
int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
printf("CurrentIp: %d.%d.%d.%d\n", nIp1, nIp2, nIp3, nIp4);
printf("UserDefinedName: %s\n\n", pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);
else if (pstMVDevInfo->nTLayerType == MV_USB_DEVICE)
printf("UserDefinedName: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf("Serial Number: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chSerialNumber);
printf("Device Number: %d\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.nDeviceNumber);
printf("Not support.\n");
return true;
LRESULT CALLBACK WndProc(HWND hWnd, UINT msg, WPARAM wParam, LPARAM lParam)
switch (msg)
case WM_DESTROY:
PostQuitMessage(0);
g_hwnd = NULL;
break;
return DefWindowProc(hWnd, msg, wParam, lParam);
static unsigned int __stdcall CreateRenderWindow(void* pUser)
HINSTANCE hInstance = ::GetModuleHandle(NULL);
WNDCLASSEX wc;
wc.cbSize = sizeof(wc);
wc.style = CS_HREDRAW | CS_VREDRAW;
wc.cbClsExtra = 0;
wc.cbWndExtra = 0;
wc.hInstance = hInstance;
wc.hIcon = ::LoadIcon(NULL, IDI_APPLICATION);
wc.hIconSm = ::LoadIcon(NULL, IDI_APPLICATION);
wc.hbrBackground = (HBRUSH)(COLOR_WINDOW + 1);
wc.hCursor = ::LoadCursor(NULL, IDC_ARROW);
wc.lpfnWndProc = WndProc;
wc.lpszMenuName = NULL;
wc.lpszClassName = "RenderWindow";
if (!RegisterClassEx(&wc))
return 0;
DWORD style = WS_OVERLAPPEDWINDOW;
DWORD styleEx = WS_EX_APPWINDOW | WS_EX_WINDOWEDGE;
RECT rect = { 0, 0, 640, 480 };
AdjustWindowRectEx(&rect, style, false, styleEx);
HWND hWnd = CreateWindowEx(styleEx, "RenderWindow", "Display", style, 0, 0,
rect.right - rect.left, rect.bottom - rect.top, NULL, NULL, hInstance, NULL);
if (hWnd == NULL)
return 0;
::UpdateWindow(hWnd);
::ShowWindow(hWnd, SW_SHOW);
g_hwnd = hWnd;
MSG msg = { 0 };
while (msg.message != WM_QUIT)
if (PeekMessage(&msg, 0, 0, 0, PM_REMOVE))
TranslateMessage(&msg);
DispatchMessage(&msg);
return 0;
static unsigned int __stdcall WorkThread(void* pUser)
int nRet = MV_OK;
MV_FRAME_OUT_INFO_EX stImageInfo = { 0 };
MV_DISPLAY_FRAME_INFO stDisplayInfo = { 0 };
unsigned char* pData = (unsigned char*)malloc(sizeof(unsigned char) * (g_nPayloadSize));
if (pData == NULL)
return 0;
unsigned int nDataSize = g_nPayloadSize;
while (1)
nRet = MV_CC_GetOneFrameTimeout(pUser, pData, nDataSize, &stImageInfo, 1000);
if (nRet == MV_OK)
printf("Get One Frame: Width[%d], Height[%d], nFrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
if (g_hwnd)
stDisplayInfo.hWnd = g_hwnd;
stDisplayInfo.pData = pData;
stDisplayInfo.nDataLen = stImageInfo.nFrameLen;
stDisplayInfo.nWidth = stImageInfo.nWidth;
stDisplayInfo.nHeight = stImageInfo.nHeight;
stDisplayInfo.enPixelType = stImageInfo.enPixelType;
MV_CC_DisplayOneFrame(pUser, &stDisplayInfo);
printf("No data[0x%x]\n", nRet);
if (g_bExit)
break;
free(pData);
return 0;
int main()
int nRet = MV_OK;
void* handle = NULL;
MV_CC_DEVICE_INFO_LIST stDeviceList = { 0 };
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
break;
if (stDeviceList.nDeviceNum > 0)
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (NULL == pDeviceInfo)
break;
PrintDeviceInfo(pDeviceInfo);
printf("Find No Devices!\n");
break;
printf("Please Input camera index:");
unsigned int nIndex = 0;
scanf_s("%d", &nIndex);
if (nIndex >= stDeviceList.nDeviceNum)
printf("Input error!\n");
break;
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
printf("Create Handle fail! nRet [0x%x]\n", nRet);
break;
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
if (stDeviceList.pDeviceInfo[nIndex]->nTLayerType == MV_GIGE_DEVICE)
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (nRet != MV_OK)
printf("Warning: Set Packet Size fail nRet [0x%x]!", nRet);
printf("Warning: Get Packet Size fail nRet [0x%x]!", nPacketSize);
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
MVCC_INTVALUE stParam = { 0 };
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
g_nPayloadSize = stParam.nCurValue;
unsigned int nThreadID = 0;
void* hCreateWindow = (void*)_beginthreadex(NULL, 0, CreateRenderWindow, handle, 0, &nThreadID);
if (NULL == hCreateWindow)
break;
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
nThreadID = 0;
void* hThreadHandle = (void*)_beginthreadex(NULL, 0, WorkThread, handle, 0, &nThreadID);
if (NULL == hThreadHandle)
break;
printf("Press a key to stop grabbing.\n");
WaitForKeyPress();
g_bExit = true;
WaitForSingleObject(hThreadHandle, INFINITE);
CloseHandle(hThreadHandle);
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
printf("ClosDevice fail! nRet [0x%x]\n", nRet);
break;
nRet = MV_CC_DestroyHandle(handle);
if (MV_OK != nRet)
printf("Destroy Handle fail! nRet [0x%x]\n", nRet);
break;
} while (0);
if (nRet != MV_OK)
if (handle != NULL)
MV_CC_DestroyHandle(handle);
handle = NULL;
printf("Press a key to exit.\n");
WaitForKeyPress();
return 0;
运行效果:

D:\MVS\MVS\Development\Documentations 里面有各种语言及相关的SDK开发指南,如果是C++,也看《工业相机SDK开发指南 C》,里面关于工业相机的各种操作如取流、图像采集、图像处理等等都有详细的API调用,需要什么,就去这个文档中去查阅。

D:\MVS\MVS\Development\Samples\VC\VS 里面是VS项目的开发示例,前面六个是已经写好的MFC界面程序,具体的操控看示例程序说明VS2008.pdf,SimpleSamples中的是一个个小示例,在《工业相机SDK开发指南 C》里面有讲解。
最近在做一个项目,涉及到工业相机,需要对其进行二次开发。相机方面选择了海康威视,网上关于海康威视工业相机SDK的开发资料很少,自己也摸索了一段时间,请教大佬,终于有了些收获,记录下来,方面以后查阅。目录1.说明1.1软硬件相关配置1.1.1硬件选择1.1.2软件选择1.2关于安防相机与工业相机1.说明1.1软硬件相关配置1.1.1硬件选择工业相机我选择的是海康威视的,具体的参数如下:工业相机资料:https://c109334.hi1718.com/news/201831317343619.
本文接上次的博客海康威视工业相机SDK二次开发(VS+Opencv+QT+海康SDK+C++)(一),上个博客中并未用到QT,本文介绍项目内容及源码,供大家参考。
由于我的项目中是用海康相机作为拍照的一个中介,重点是在目标识别方向,请阅读源码时自动忽略。
如果对目标识别感兴趣,可以参考我的YOLO系列
https://blog.csdn.net/qq_45445740/category_9794819.html
目录1.说明1.1 环境配置1.2 背景说明2.源码MvCamera.hmythread.
【注意事项】
------------------------------------
1. 请到海康威视官网下载最新版本设备网络SDK:http://www.hikvision.com/Cn/download_more_401.html
2. 请将设备网络SDK开发包【库文件】里的HCNetSDK.dll、HCCore.dll、HCNetSDKCom文件夹、PlayCtrl.dll、SuperRender.dll、AudioRender.dll、ssleay32.dll、libeay32.dll、zlib1.dll、hpr.dll等文件均拷贝到bin文件夹下。HCNetSDKCom文件夹(包含里面的功能组件dll库文件)需要和HCNetSDK.dll、HCCore.dll一起加载,放在同一个目录下,且HCNetSDKCom文件夹名不能修改。
3. 如果自行开发软件不能正常实现相应功能,而且程序没有指定加载的dll库路径,请在程序运行的情况下尝试删除HCNetSDK.dll。如果可以删除,说明程序可能调用到系统盘Windows->System32目录下的dll文件,建议删除或者更新该目录下的相关dll文件;如果不能删除,dll文件右键选择属性确认SDK库版本。
4. 如按上述步骤操作后还是不能实现相应功能,请根据NET_DVR_GetLastError返回的错误号判断原因。
海康威视工业相机SDK二次开发
好气,第一次写文章,结果没不小心保存关掉,什么都没了。
本人是一名在读研究生,被导师分配了做项目中
海康工业相机的
二次开发。实现8
相机同时打开视频流,分
相机采图保存到各自的文件夹中。由于网上关于
海康SDK的
二次开发内容较少,对新手较不友好,自己也磕磕绊绊做了一段时间,现回过头来做个小总结。这里主要写的是如何迈出
二次开发的第一步。
一个踩过的小误区
### 回答1:
海康相机SDK是海康威视公司推出的一款相机软件开发工具包,它可以帮助开发者实现对海康相机的控制与数据处理。而使用Qt编写的二次开发程序可以在跨平台、界面友好、开发效率高等方面表现出色。因此,将海康相机SDK二次开发Qt的方法可以有效提高开发效率和使用体验。
在二次开发Qt程序之前,首先需要安装海康相机SDK和Qt开发环境。然后,通过SDK给出的样例程序,了解相机控制和数据处理的基本操作。接下来,结合Qt的开发框架,建立相应界面和事件响应,并利用海康相机SDK提供的函数,实现相机的开启、关闭、捕获图片等操作。同时,也要考虑到Qt与SDK之间的数据转换和参数传递的问题。
在开发过程中,需要注意一些细节问题,如相机连接状态的检测、相机参数的设置、图像处理算法的优化等。同时,也可以结合其他相关的开源库,如OpenCV等,进一步丰富程序的功能。
总之,海康相机SDK二次开发Qt是一个非常有前景和实际意义的开发方向。通过此类程序的开发,可以提高海康相机的应用范围和应用效果,满足不同用户的实际需求。
### 回答2:
海康相机SDK是一款网络摄像机开发工具包,可以提供高质量的视频流和图像采集,集成该SDK到QT开发环境中可以实现基于网络摄像机的图像处理和视频监测应用的开发。
在使用海康相机SDK进行QT二次开发的过程中,需要首先了解SDK操作和QT编程的基本知识。在使用SDK时,需要通过SDK提供的API进行网络摄像机的控制、图像采集和视频流显示等操作。在此基础上,可以使用QT编程实现各种功能和应用,例如图像增强、文本识别、动态拍照和视频监测等。
在进行二次开发时,还需要注意SDK的版本选择和兼容性问题。另外,需要考虑软硬件平台的匹配问题,例如CPU架构、操作系统和网络接口等。在具体实现中,可以使用QT提供的多种工具和组件,例如QT designer、QT creator和QT widgets等,以提高开发效率和代码质量。
总之,通过海康相机SDK的二次开发和QT编程的结合,可以实现基于网络摄像机的各种应用和功能,为用户提供更加便捷、高效的视频监测和图像处理体验。
### 回答3:
海康相机sdk是一个旨在为开发者提供海康威视相机设备的二次开发接口的软件开发工具包。对于开发者来说,使用海康相机sdk进行二次开发是非常重要的,这是因为该工具包提供了丰富的API,可以使开发者更加高效地定制相机设备的软件功能。
在海康相机sdk二次开发中,Qt是一种流行的跨平台开发框架,可以集成到C++中,使用Qt编写对于初学者来说也比较容易上手。我们可以使用Qt Creator IDE来编写程序,该IDE支持快速的窗口设计和多线程开发。同时,Qt还提供了很好的图形用户界面(GUI)支持,这对于开发相机设备用户友好的UI界面非常重要。
在使用海康相机sdk进行二次开发时,我们需要遵守相应的开发流程,首先需要进行硬件设备连接和查询,然后创建相应的海康相机对象,并且设置相机参数、注册回调函数等。之后,我们可以使用Qt编写界面并添加关于设备的一些功能,例如录像、拍照和保存数据等。
总之,使用海康相机sdk进行二次开发是一个涉及不同技术的综合性开发过程,例如设备硬件、图像处理、网络和GUI开发,同时也需要注意程序的健壮性和安全性等方面的考虑。虽然这个过程可能会面临一些挑战,但是在付出努力后,我们可以获得一个高效且功能强大的相机设备软件,满足我们的需求。

