由于本科是电气专业,所以没有数字信号处理相关知识,在一开始看数字信号处理相关理论的时候就显得比较力不从心,尤其是难懂的数学公式。相比看到这里的读者多多少少也有类似的体会。
好在功夫不负有心人,本博主从繁琐的公式中,加上其他博主的博客讲解,领悟了如何使用C代码实现几种经典数字滤波器,可以使其在VS或者单片机上运行而不受限于在matlab上跑仿真。
当然在本篇博客中,主要是以巴特沃斯滤波器做讲解,其他经典滤波器由于数学公式和讲解都比较少,因此没研究出来。若有读者发现较好的资源,欢迎留言一起分享。
好的,读到这里,先讲解一个同学进场会遇到却不是太理解的概念——滤波器的阶数代表什么意思?其实博主一开始也不理解,后来用C代码实现的时候突然顿悟的。答案是:阶数N,代表着在该滤波器中,需要前N个时刻的采样点数据参与运算。
读到这里可能有的读者还不是太理解。没关系,当你读完整篇博客之后,再回过头都这句话试一下。(其实是博主整理了半天语言也没想到一句通俗易懂的话来描述,如果想到了后期再回来更新吧)
讲解完了一阶滤波器,下面我们来看下高阶滤波器的实现。
看到这里,有读者可能会问,这个阶数怎么选,是选择使用一阶滤波器还是高阶的,高阶滤波器究竟选择几阶?这其实是有一个数学公式计算你所需的滤波器阶数的,但是由于太过繁琐,不好记,因此在工程领域中不推荐记忆。
这里给大家一个经验,就是滤波器阶数越高,滤波效果越好。
因此,若读者的处理器性能足够强,直接上高阶滤波器即可(阶数越高,计算量越大),一般四到六阶即可解决大部分问题。(有的场景需要高阶滤波器才会完全滤除杂波,但是受到处理器性能影响滤除不干净,因此可以适当降低阶数,因此使用公式计算所需阶数基本没有意义,处理器性能达不到,只能降阶层,因此自己用代码测一下波形比通过公式计算简单得多)
下面是IIR滤波器的差分方程(直接型)。
其中:
看到这里,可能有的读者已经觉得公式有点繁琐。不过没有关系,我们继续往下看,代码实现后在会过来品味一下这个公式。
下面是通过matlab工具计算两个系数。
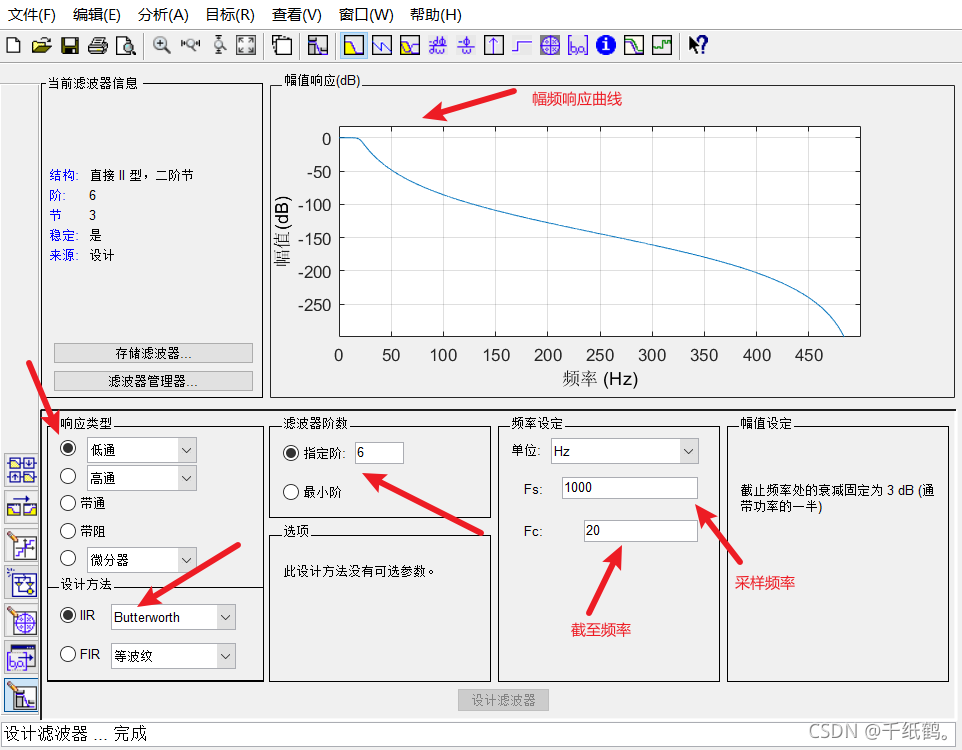
首先在matlab命令行中输入 fdatool或者filterDesigner,回车执行后会弹出一个框,如下图所示。
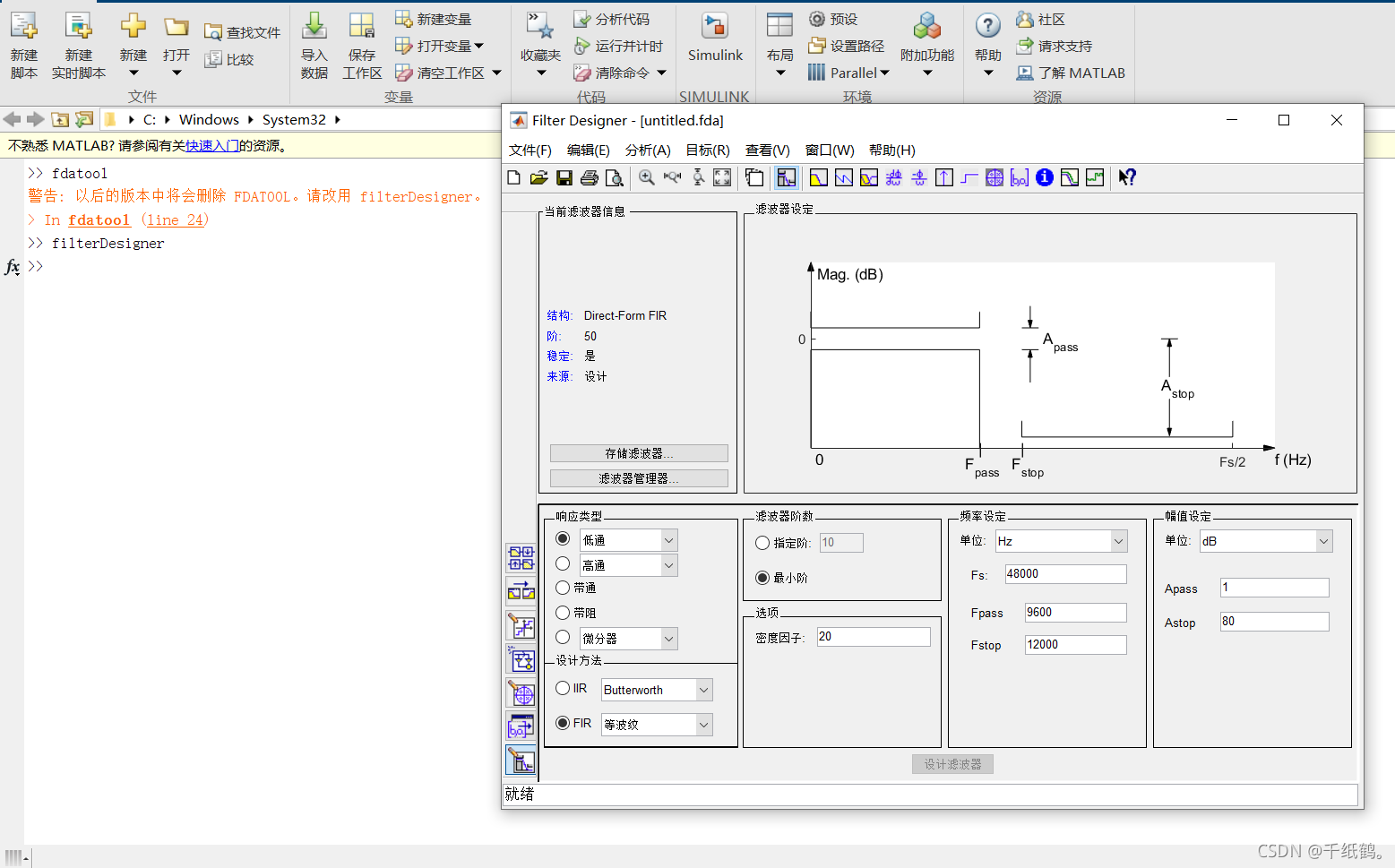
根据业务需求,选择低通或者高通滤波器(注:低通、高通、带通滤波器均为同一个公式,系数不同而已),并设计阶数,输入采样频率和截至频率,点击设计滤波器。
观察幅频响应曲线可以看到,从20Hz开始衰减,50Hz是衰减达到50dB,此处需读者根据自己使用情况调节截止频率的参数。
如下图所示,点击两个按钮,将滤波器系数转换为单节结构,得到滤波器系数。分母为y(n)的系数ak,分子为x(n)系数bk。
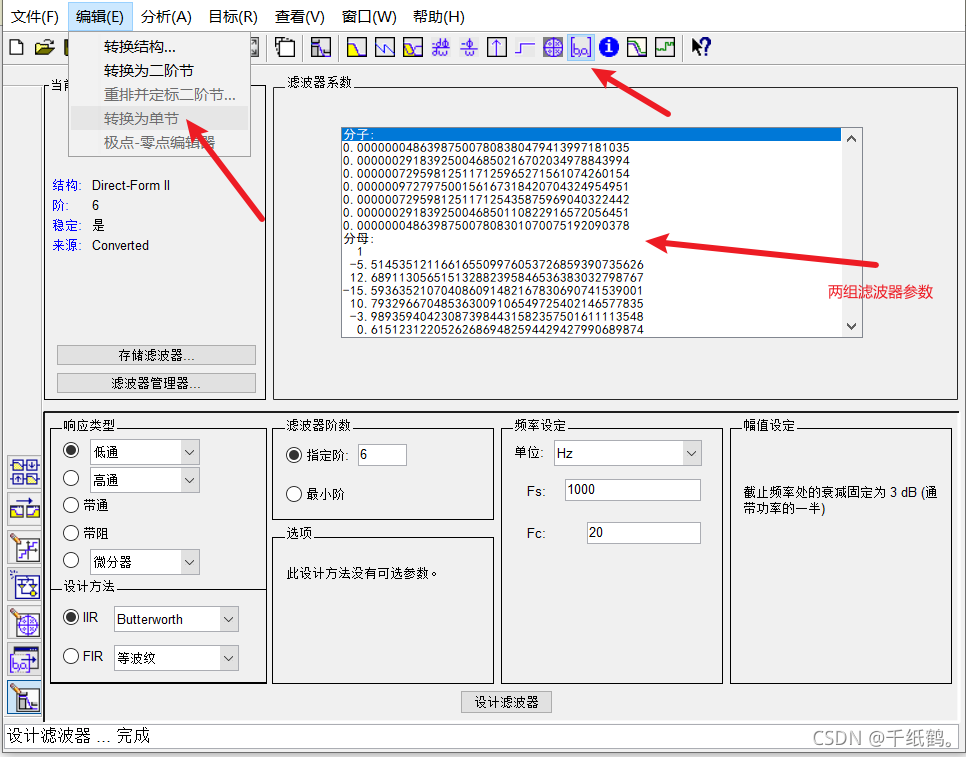
将两组参数带入,得到下面公式。
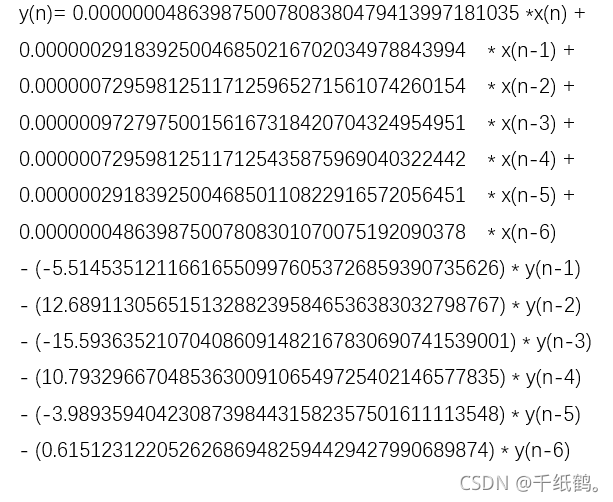
那本文中,列举了低通滤波器的实现方法,高通滤波器和带通滤波器的实现方法同上,更改系数即可实现。
下面是代码展示:
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using 肌电可视化界面.ViewModel;
using NWaves;
using NWaves.Signals;
using NWaves.Filters;
using NWaves.Filters.Bessel;
namespace 肌电可视化界面
class SingleProcess
int FilterDataNum_VAR = 10000; //全局变量--采集信号的长度
int FilterDataFrequence_VAR = 10000; //全局变量--采集信号的频率
int LowPassCutoffFre_VAR = 150; //全局变量--信号预处理低通截至频率
public Tuple<double[],double[]> Pretreatment()
double FilterSamplingInterval = 1.0 / Convert.ToDouble( FilterDataFrequence_VAR); //全局变量--采集信号的间隔
double[] Sin200Hz=new double[FilterDataNum_VAR],Sin300Hz = new double[FilterDataNum_VAR], Sin1Hz = new double[FilterDataNum_VAR], Sin50Hz = new double[FilterDataNum_VAR], Sin100Hz = new double[FilterDataNum_VAR];
double[] InputData = new double[FilterDataNum_VAR];
int x = 0;
for (double i = 0;x< FilterDataNum_VAR; i=i+ FilterSamplingInterval,x++)
//Sin200Hz[x] = Math.Sin(Math.PI * 400 * i);
Sin300Hz[x] = Math.Sin(Math.PI * 600 * i);
//Sin1Hz[x] = Math.Sin(Math.PI * 2.0 * i);
Sin50Hz[x] = Math.Sin(Math.PI * 100 * i);
//Sin100Hz[x] = Math.Sin(Math.PI * 200 * i);
InputData[x] = Sin200Hz[x] + Sin300Hz[x] + Sin1Hz[x]+ Sin50Hz[x]+ Sin100Hz[x];
//var OutputData=FirstOrderLowPass(InputData);
//var OutputData = IIRLowPassFilter(InputData);
//var OutputData = IIRNotchFilter(InputData);
//var OutputData = IIRLowPassFilter_5(InputData);
var OutputData = IIRLowPassFilter_6(InputData);
//var OutputData = IIRBandPassFilter_6(InputData);
//OutputData = IIRHighPassFilter_3(OutputData);
//OutputData = IIRNotchFilter(OutputData);
//OutputData = IIRLowPassFilter(OutputData);
//var OutputData = FourthOrderRCLowpassFilter(InputData);
Tuple<double[], double[]> value = new Tuple<double[], double[]>(InputData, OutputData);
return value;
public double[] FirstOrderLowPass(double[] ProSingle) //一阶低通滤波
double[] FilteredData =new double[FilterDataNum_VAR]; //滤波后数据
double LowPassCoefficient = (1.0 / FilterDataFrequence_VAR) * 2 * 3.1415926 * LowPassCutoffFre_VAR; //低通滤波器系数
FilteredData[0] = ProSingle[0];
for(int i=1;i< FilterDataNum_VAR;i++)
FilteredData[i] =LowPassCoefficient * ProSingle[i] + ((1.0 - LowPassCoefficient) * FilteredData[i - 1]);
return FilteredData;
public double[] IIRLowPassFilter(double[] ProSingle) //IIR3阶低通滤波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
FilteredData[0] = ProSingle[0];
FilteredData[1] = ProSingle[1];
FilteredData[2] = ProSingle[2];
FilteredData[3] = ProSingle[3];
for (int i = 3; i < FilterDataNum_VAR; i++)
FilteredData[i] = 0.00009544*ProSingle[i] + 0.0002863 * ProSingle[i - 1] + 0.0002863*ProSingle[i - 2] + 0.00009844 * ProSingle[i - 3] - (-2.81157) * FilteredData[i - 1] - 2.64048 * FilteredData[i - 2] - (-0.828146) * FilteredData[i - 3];
return FilteredData;
public double[] IIRNotchFilter(double[] ProSingle) //IIR陷波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
double[] W = new double[3];
double[] IIR_B = new[] { 0.9984039, -1.995822607, 0.998403955 };
double[] IIR_A =new []{1, -1.995822607, 0.9968079114};
W[0] = 0; W[1] = 0; W[2] = 0;
for (int i = 0;i< FilterDataNum_VAR;i++)
W[0] = ProSingle[i] - IIR_A [1]* W[1] - IIR_A [2]* W[2];
FilteredData[i] = IIR_B[0] * W[0] + IIR_B[1] * W[1] + IIR_B[2] * W[2];
W[2] = W[1];
W[1] = W[0];
return FilteredData;
public double[] IIRLowPassFilter_5(double[] ProSingle) //IIR5阶低通滤波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
FilteredData[0] = ProSingle[0];
FilteredData[1] = ProSingle[1];
FilteredData[2] = ProSingle[2];
FilteredData[3] = ProSingle[3];
FilteredData[4] = ProSingle[4];
FilteredData[5] = ProSingle[5];
for (int i = 5; i < FilterDataNum_VAR; i++)
FilteredData[i] = 0.000000200242067359682832116980072401091 * ProSingle[i]
+ 0.000001001210336798414160584900362005456 * ProSingle[i - 1]
+ 0.000002002420673596828321169800724010912 * ProSingle[i - 2]
+ 0.000002002420673596828321169800724010912 * ProSingle[i - 3]
+ 0.000001001210336798414160584900362005456 * ProSingle[i - 4]
+ 0.000000200242067359682832116980072401091 * ProSingle[i - 5]
- (-4.695040626100188241309751902008429169655) * FilteredData[i - 1]
- 8.82614592256382479718013200908899307251 * FilteredData[i - 2]
- (-8.30396669308456125691009219735860824585) * FilteredData[i - 3]
- 3.909893994115305027037265972467139363289 * FilteredData[i - 4]
- (-0.737026189748224092035400190070504322648) * FilteredData[i - 5];
return FilteredData;
public double[] IIRLowPassFilter_6(double[] ProSingle) //IIR6阶低通滤波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
FilteredData[0] = ProSingle[0];
FilteredData[1] = ProSingle[1];
FilteredData[2] = ProSingle[2];
FilteredData[3] = ProSingle[3];
FilteredData[4] = ProSingle[4];
FilteredData[5] = ProSingle[5];
FilteredData[6] = ProSingle[6];
for (int i = 6; i < FilterDataNum_VAR; i++)
FilteredData[i] = 0.000000009167825068393774824625978674131 * ProSingle[i]
+ 0.000000055006950410362648947755872044785 * ProSingle[i - 1]
+ 0.000000137517376025906622369389680111962 * ProSingle[i - 2]
+ 0.000000183356501367875496492519573482616 * ProSingle[i - 3]
+ 0.000000137517376025906622369389680111962 * ProSingle[i - 4]
+ 0.000000055006950410362648947755872044785 * ProSingle[i - 5]
+ 0.000000009167825068393774824625978674131 * ProSingle[i - 6]
- (-5.635880915490254494670807616785168647766) * FilteredData[i - 1]
- 13.245104571761700640308845322579145431519 * FilteredData[i - 2]
- (-16.614170156135600109337246976792812347412) * FilteredData[i - 3]
- 11.731246791933443773814360611140727996826 * FilteredData[i - 4]
- (-4.420971029104483918104051554109901189804) * FilteredData[i - 5]
- 0.694671323775999050020857339404756203294 * FilteredData[i - 6];
return FilteredData;
public double[] IIRHighPassFilter_3(double[] ProSingle) //IIR3阶高通滤波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
FilteredData[0] = ProSingle[0];
FilteredData[1] = ProSingle[1];
FilteredData[2] = ProSingle[2];
FilteredData[3] = ProSingle[3];
for (int i = 3; i < FilterDataNum_VAR; i++)
FilteredData[i] = 0.987512174869590753090164980676490813494 * ProSingle[i]
+ -2.962536524608772481315099867060780525208 * ProSingle[i - 1]
+ 2.962536524608772481315099867060780525208 * ProSingle[i - 2]
+ -0.987512174869590753090164980676490813494 * ProSingle[i - 3]
- (-2.974867424113648350925132035627029836178) * FilteredData[i - 1]
- 2.950049679327468421519142793840728700161 * FilteredData[i - 2]
- (-0.975180295515609030232440090912859886885) * FilteredData[i - 3];
return FilteredData;
public double[] IIRBandPassFilter_6(double[] ProSingle) //IIR6阶带通滤波
double[] FilteredData = new double[FilterDataNum_VAR]; //滤波后数据
FilteredData[0] = ProSingle[0];
FilteredData[1] = ProSingle[1];
FilteredData[2] = ProSingle[2];
FilteredData[3] = ProSingle[3];
FilteredData[4] = ProSingle[4];
//FilteredData[5] = ProSingle[5];
//FilteredData[6] = ProSingle[6];
for (int i = 6; i < FilterDataNum_VAR; i++)
FilteredData[i] = 0.00157610530654539037105632548474432042 * ProSingle[i]
+ 0 * ProSingle[i - 1]
+ -0.00315221061309078074211265096948864084 * ProSingle[i - 2]
+ 0 * ProSingle[i - 3]
+ 0.00157610530654539037105632548474432042 * ProSingle[i - 4]
//+ 0 * ProSingle[i - 5]
//+ -0.018098933007514465820531057715925271623 * ProSingle[i - 6]
- (-3.882301518552897512392974022077396512032) * FilteredData[i - 1]
- 5.655640987638847150265064556151628494263 * FilteredData[i - 2]
- (-3.664245505992618223700674207066185772419) * FilteredData[i - 3]
- 0.890907362087139609307939736027037724853 * FilteredData[i - 4];
//- (-0.331778114794525014197290602169232442975) * FilteredData[i - 5]
//- 0.278059917634546460707412052215659059584 * FilteredData[i - 6];
return FilteredData;
运行效果:
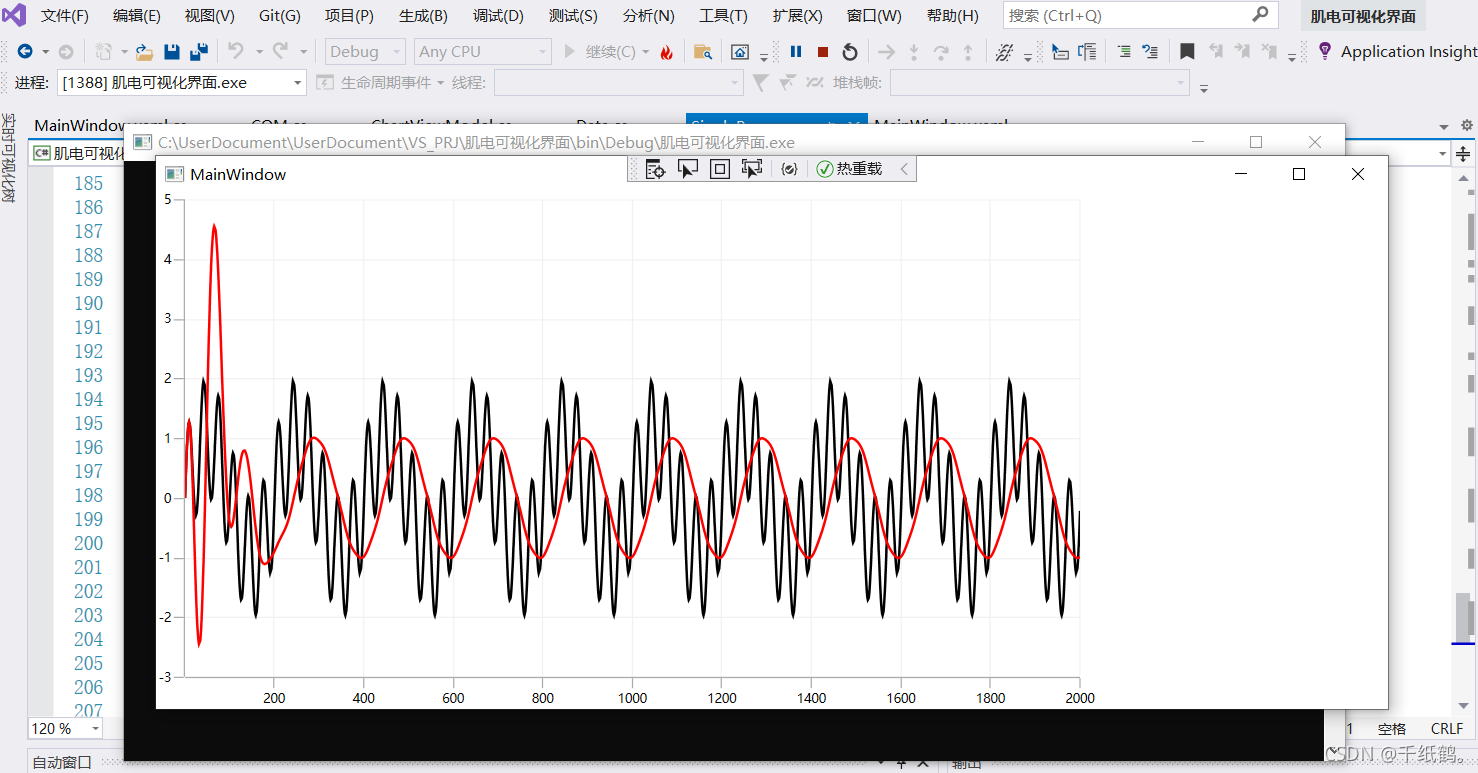
本系统中,仅仅保留了50Hz分量,其他干扰信号全部滤除。(注:本系统需要持续输入信号,不能将短时的采样片段输入,否则会得到如上图前150个采样点的效果,大大影响效果)
喜欢的话,别忘了给博主点个小心心哦。
低通、高通数字滤波器——C语言单片机实现一阶滤波器高阶滤波器博主刚好进入研二,研究的方向刚好涉及到数字滤波这一块,因此花了一周时间钻研了下数字滤波的实现。由于本科是电气专业,所以没有数字信号处理相关知识,在一开始看数字信号处理相关理论的时候就显得比较力不从心,尤其是难懂的数学公式。相比看到这里的读者多多少少也有类似的体会。好在功夫不负有心人,本博主从繁琐的公式中,加上其他博主的博客讲解,领悟了如何使用C代码实现几种经典数字滤波器,可以使其在VS或者单片机上运行而不受限于在matlab上跑仿真。当然在
在
单片机进行数据采集时,会遇到数据的随机误差,随机误差是由随机干扰引起的,其特点是在相同条件下测量同一量时,其大小和符号会现无规则的变化而无法预测,但多次测量的结果符合统计规律。为克服随机干扰引起的误差,硬件上可采用滤波技术,软件上可采用软件算法
实现数字滤波。滤波算法往往是系统测控算法的一个重要组成部分,实时性很强。
采用
数字滤波算法克服随机干扰的误差具有以下优点:
目前,项目需要处理信号。目标信号是特定频率范围内的信号。高频视为干扰。而一阶RC滤波器容易实现。但是网上资料往往没有详细的推导。因此在这里把笔记记下。本文的优势是比较详细,参数配置都有公式依据。
1、一阶RC低通滤波器的算法实现
1.1 算法推导
1.2 波特图
1.3 用C语言实现
2、一阶RC高通滤波器的原理以及实现
2.1 原理推导
2.2 波特图
2.3 用C语言...
一阶滤波,又叫一阶惯性滤波,或一阶
低通滤波。是使用软件编程
实现普通硬件RC
低通滤波器的功能。
一阶
低通滤波的算法公式为:
Y(n)=αX(n) (1-α)Y(n-1)
式中:α=滤波系数;X(n)=本次采样值;Y(n-1)=上次滤波输出值;Y(n)=本次滤波输出值。
一阶
低通滤波法采用本次采样值与
[知识交流]当信号和干扰信号同时存在时,不会发生叠加吗?要如何滤掉干扰信号?
文章发表于:2007-10-21 18:16
这是对滤波的理解有误,滤波不是指滤掉干扰信号的幅值,而是滤掉它的频率。有用信号和干扰信号的频率不同,如果干扰信号的频率高,则用一个低通滤波器滤掉干扰信号,如果信号频率高,则用一个高通滤波器滤掉干扰信号。
MATLA...
/*******************************************************************************
** 程序名称:FIR低通滤波器
** 程序描述:50阶FIR低通滤波器,通过频率2500Hz,截止频率3000Hz
** 性能提升:
** 程序版本:V1.0
** 程序作者:syrchina
** 最后修改:2011年8月1日
数字滤波器的C语言实现通常分为三种类型:高通滤波器、低通滤波器和带通滤波器。其中,高通滤波器可以通过滤除低频信号来保留高频信号,低通滤波器可以滤除高频信号来保留低频信号,带通滤波器则是同时滤除高、低频信号,只保留一个中间的频率段。
实现数字滤波器可以采用一些经典的滤波算法,如FIR(有限脉冲响应滤波器)和IIR(无限脉冲响应滤波器)。以FIR滤波器为例,其C语言实现需要定义一组系数,可以通过差分方程或直接计算获得。一般而言,FIR滤波器的算法步骤包括采样、计算、存储等过程,其代码实现如下:
#define FILTER_LEN 51 // 滤波器长度
float filter[FILTER_LEN] = { 0.0 }; // 滤波器系数
float input_data = 0.0; // 输入数据
float output_data = 0.0; // 输出数据
void fir_filter(float data)
int i;
float tmp = 0.0;
// 滑动数组
for (i = (FILTER_LEN - 1); i >= 1; i--) {
filter[i] = filter[i - 1];
// 存储新数据
filter[0] = data;
// 计算输出数据
for (i = 0; i < FILTER_LEN; i++) {
tmp += filter[i] * filter[FILTER_LEN - 1 - i];
output_data = tmp;
对于高通、低通和带通滤波器的实现,可以根据其特点来定义不同的滤波算法和系数。例如,对于低通滤波器而言,滤波器系数应该反映出其去除高频信号的特性,可以通过对一组低通滤波器的系数进行加权和以获得不同的截止频率。而对于带通滤波器,则需要同时考虑其阻带和通带的特性,进而确定其滤波器系数和算法。