


20个辅助驾驶潜在失效场景深度总结,安全第一,谨慎使用!

蔚来车主辅助驾驶事故让人深感惋惜,同时也暴露了当下整个自动驾驶行业,从产品、到宣传、再到终端用户, 对辅助驾驶安全使用的重视程度严重不足!


在我看来,厂家宣传上“现阶段辅助驾驶不能代替人工驾驶,需时刻关注路边,随时准备接管车辆......"的描述如同xx禁止18岁以下访问、烟盒上“吸烟有害健康”一样, 对终端实际用户的约束能力几乎为零。
强烈呼吁各个车企准确宣传辅助驾驶,明确车型辅助驾驶能力边界,告知用户辅助驾驶潜在失效场景, 不要让林先生的事故重演。
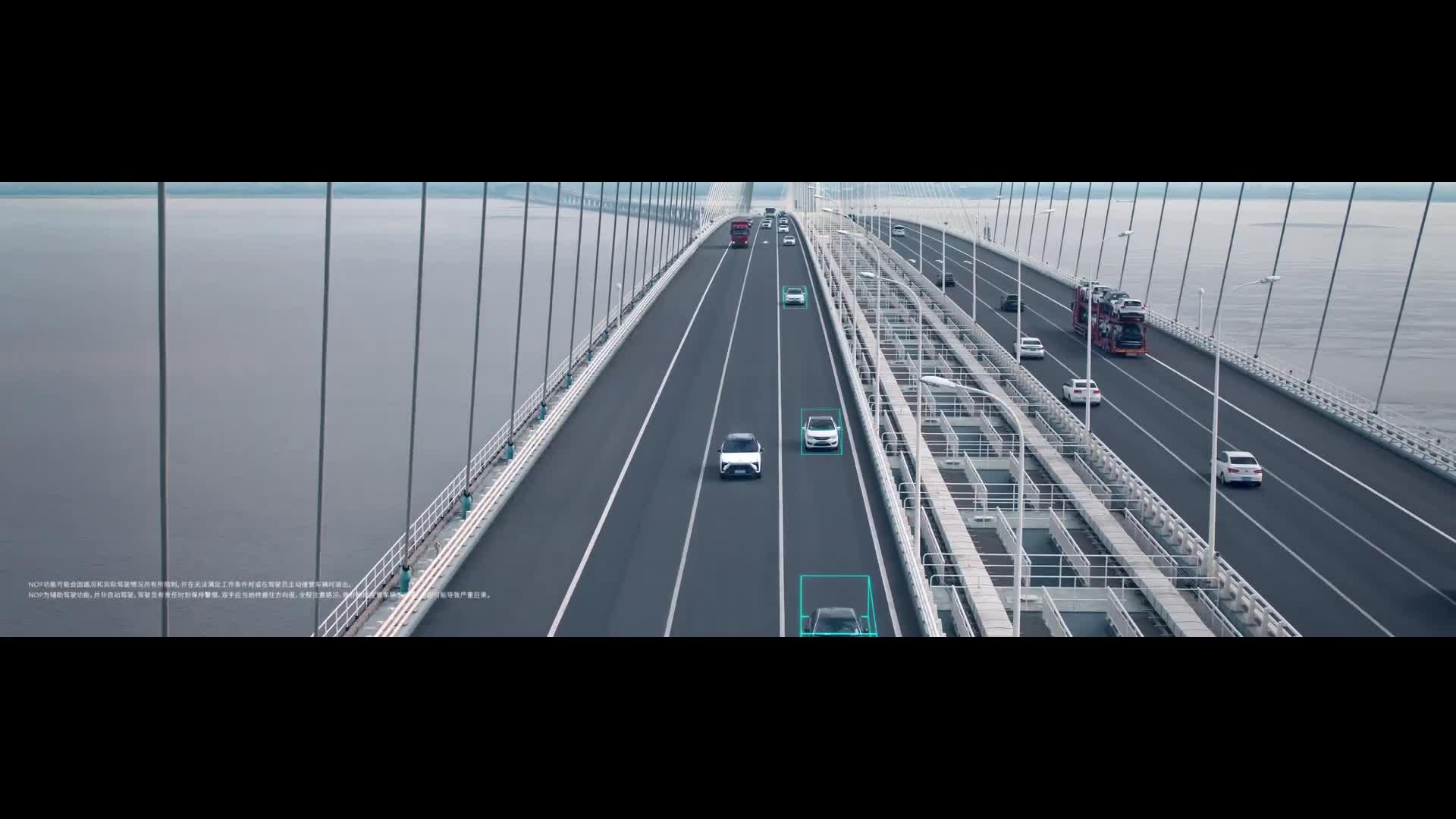 △ 蔚来NOP领航辅助驾驶宣传视频
https://www.zhihu.com/video/1411464805635534848
△ 蔚来NOP领航辅助驾驶宣传视频
https://www.zhihu.com/video/1411464805635534848
想要用好辅助驾驶功能,真正实现给驾驶减负的目的, 首先要知道车辆辅助驾驶能力边界在哪,哪些场景车辆能Hold得住,哪些场景有风险,需要提前接管。
作为汽车从业人员和智能电动汽车深度使用者,本文结合日常使用辅助驾驶经验,总结了20个辅助驾驶潜在失效场景,供开车的朋友参考。
文章较长,建议看完,并分享给身边开车的朋友。
1、雨天雾天雪天不用
目前多数辅助驾驶系统均依赖摄像头和毫米波雷达做主要感知工具, 摄像头的局限性如人眼一般, 在雨雪雾天气,能见度降低时,也会出现障碍物或周围交通参与者,识别不及时或识别不到的问题。
除此之外,雨雪天气车辆制动距离会增加,风险进一步提高,这种情况建议人工驾驶。


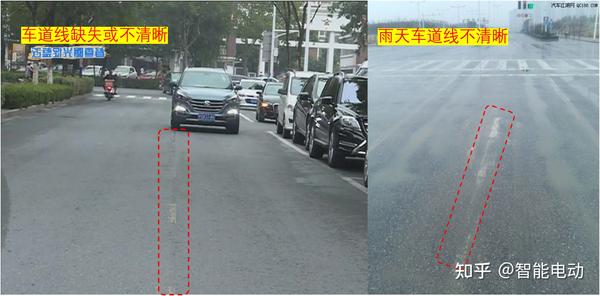
2、车道线不清晰或缺失路段不用
现阶段辅助驾驶系统对车道线的依赖性非常高,因为机器只有识别到车道线才会认为这里有路能走。
但在日常行驶道路,经常会遇到车道线由于磨损或其他原因,有部分缺失或不清晰的路段。较短距离内多数辅助驾驶车辆可以依靠另外一边车道线,预测道路走向,不会退出辅助驾驶,但一般车道线异常超过3~5米,车辆就会报警提示或退出。
这种车道线异常在雨天会危险,切勿使用辅助驾驶。

3、城市低速开放路段不用
国内城市低速道路最右侧车道,长期处于被非机动车占用的非可用状态,加上经常窜出来的电瓶车,和不守交规的行人。 在低速开放路段使用辅助驾驶功能,很可能遇到车辆反应不及时导致事故的问题,对公共交通也是危害。
小编多次在快速路上偶遇电瓶车,现在还心有余悸。


4、施工路段不用
在施工路段,人类驾驶员都常会出现磕碰刮擦,更别说不成熟的辅助驾驶了,虽然目前部分车型能识别雪糕筒和路障,但即便是视觉能力超强的特斯拉,也有Hold不住这种复杂的场景。
尤其需要注意高速上的施工路段,由于车速较快,留给车辆识别和动作的时间有限,切勿使用辅助驾驶。(多听导航提示)
 △ 辅助驾驶车辆雪糕筒路段事故
https://www.zhihu.com/video/1411467662770221056
△ 辅助驾驶车辆雪糕筒路段事故
https://www.zhihu.com/video/1411467662770221056




 △ 特斯拉Model3 顺利通过雪糕筒
https://www.zhihu.com/video/1411465958888792064
△ 特斯拉Model3 顺利通过雪糕筒
https://www.zhihu.com/video/1411465958888792064
即便是如特斯拉能识别雪糕筒,并成功避让的车型,实际上也给乘员造成了不小的心理负担!
(安全测试,请勿模仿)
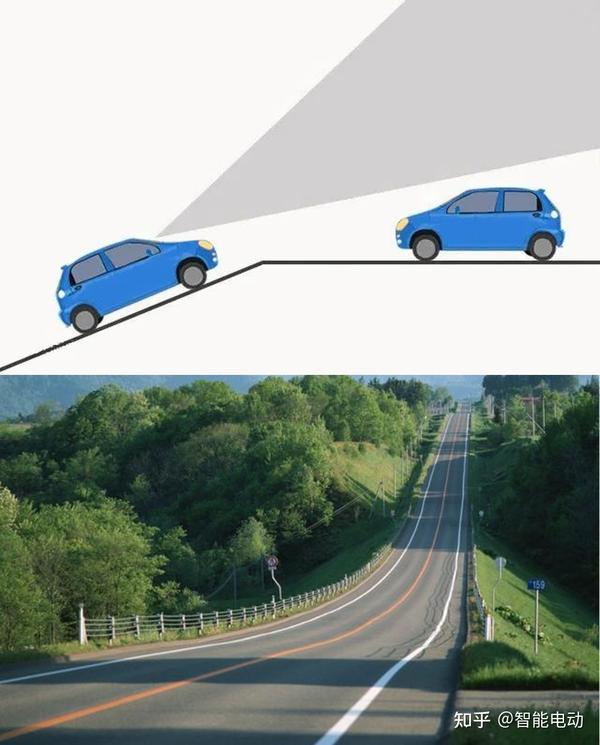
5、上坡路段不用
汽车上坡时,由于车头朝上,在接近坡顶时会有短暂的视野盲区, 这时如果刚好前面有慢车或者施工车辆,很容易导致辅助驾驶系统反应不过来,从而发生事故。
在广州广园快速,我有遇到过一次紧急情况,经过上坡路段,60km/h正常行驶,通过坡顶后前面有一辆道路清扫车,那次还好刹住了......

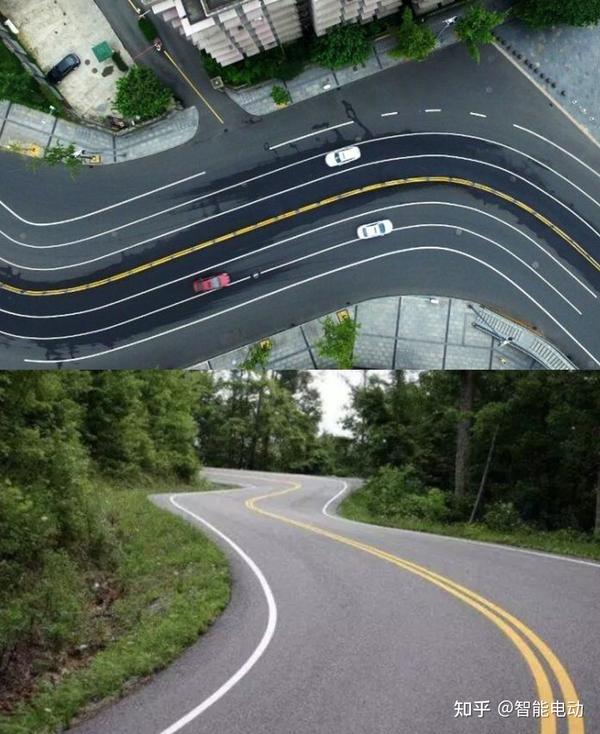
6、急弯和多弯路路段不用
即便有清晰的车道线引导,在急弯路段,目前大多数辅助驾驶车辆都不能完成循迹转弯, 一则是系统识别能力有限,二则是很多车辆辅助驾驶状态下大幅度转弯会系统退出,系统能力有限, 即使是弯道王者特斯拉Autopilot,也会有失手的时候。
另外在多弯路路段,辅助驾驶经常会在车道线内来回摆动,乘坐舒适性欠佳,也不推荐使用。

7、上下起伏路段不用
上下起伏路段会很大程度影响视觉摄像头的识别,车辆晃动后需要重新找车道线。
有次驾驶新势力某车型经过高速不平路段,车速很快,车辆突然直接向右打方向盘,紧急接管后才避免发生事故。这种情况非常不建议使用辅助驾驶。


8、大逆光场景不用
人眼在看太阳后会出现短暂的视觉受限情况,视觉摄像头这种场景下也会, 即便可以通过软件算法调整图像RGB灰度,减少阳光照射影响,但也会造成识别准确度下降的问题, 当车辆迎着太阳跑时,请谨慎使用辅助驾驶。


9、进出隧道场景不用
车辆进出隧道时,会出现前方光线突变的情况,尤其是经过几公里长的隧道后,出隧道驾驶员眼睛也要适应一段时间 ,这种场景对以视觉和车道线为主的辅助驾驶,也是不小的考验,这种场景要谨慎使用。


10、高速遇堵车不用
高速堵车是经常遇到的场景,一般堵车多数是发生追尾事故,虽然目前多数辅助驾驶车辆可以做到跟车刹停,但还是建议提前主动接管车辆, 避免前车事故同时,防止辅助驾驶急刹造成后方车辆追尾。


11、路口车道线断开不用
目前辅助驾驶对车道线依赖极强,在经过路口时,一定会遇到路口处车道线断开的情况,目前多数辅助驾驶,在这种场景下能完成自动跟车过路口, 但当前方没有目标车辆时,多数会出现警报或退出情况,尤其在大路口车道线长距离缺失场景下 ,现阶段过路口请勿使用辅助驾驶。


12、有车道入侵或障碍物不用
行驶车道内有其他车辆或障碍物入侵,对辅助驾驶的影响很大, 尤其是大货车入侵车道,或静止障碍物入侵车道,往往能逃过摄像头的识别, 已经发生过多次类似辅助驾驶事故,而且事故前很多辅助驾驶车辆根本没有刹车动作。






13、车道合流或分叉不用
经常会遇到车道合流收窄,或车道分叉变宽的场景,尤其是在红绿灯路口,这个时候辅助驾驶车辆经过一小段无车道线路段口,要重新选择车道, 收窄路口部分辅助驾驶车辆有撞上路基风险,变宽路口部分辅助驾驶车辆在重新选择目标车道时,会急打方向盘问题,造成车身大幅度摆动,有安全隐患。

14、拥堵路段加塞不用
拥堵路况经常会遇到急刹或加塞情况, 目前很多辅助驾驶车辆不能及时识别加塞车辆,是一个很大的漏洞, 且拥堵路段的跟车通常都会有自动急刹的动作,这种情况开辅助驾驶,乘坐舒适性极差,不建议使用。


15、新旧车道线混乱路段不用
新旧车道线同时存在的路段不占少数, 这对以识别车道线为主的辅助驾驶简直是难上加难,除了可能造成压线违章,凌乱的车道线还会干扰车辆行进方向。
很多时候辅助驾驶车辆甚至还会把修路残留的沥青识别成车道线,上述情况请勿使用辅助驾驶。


16、夜间周边有大车不用
通常货车或其他大车靠近辅助驾驶车辆时,由于其体积较大,占据了辅助驾驶摄像头大部分视野,摄像头由于没有识别出大车轮廓,会出现障碍物漏识别的情况, 尤其是在光线不充足的夜间,当周边有大车,尤其是大车超车时,谨慎使用辅助驾驶。


17、夜间漆黑无照明路段不用
即使在有远近光灯辅助的情况下,在漆黑没有照明的路段, 辅助驾驶摄像头的视线也会受限,有点摸瞎,可视距离远远比不上白天光线良好情况, 这种场景下,辅助驾驶车辆如遇到坑洼路面就更加危险,一方面驾驶员会有规避坑洼的倾向,一方面车辆震动也会造成车身摆动。这种情况就老老实实自己开吧!

18、留意路边有车时鬼探头场景
由于路边停放车辆导致的视野盲区,无论是行人鬼探头还是车辆鬼探头,留给驾驶员判断和踩刹车的时间都极短, 虽然目前很多安全测试项目中都有鬼探头场景,但场景单一且标准,车企在定上有应试倾向,实际路况下的突发行人横穿对辅助驾驶仍是不小的考验, 低速路段建议不使用辅助驾驶。




19、留意自动跟车时目标车辆丢失
ACC自适应巡航时, 如前车变道或驶离道路,辅助驾驶车辆需要重新寻找目标车辆,或重新计算行驶数据, 往往会伴随着加速或刹车动作,此时请尽量人为接管。

20、留意“自动导航辅助驾驶”变道超车和出匝道
目前推出 “自动导航辅助驾驶” 功能的车企有特斯拉NOA、小鹏NGP、蔚来NOP,从实际体验看,其中特斯拉NOA的驾驶风格最激进,变道超车干净利落,见缝就插,但出匝道成功率不高。蔚来NOP标定偏保守,变道时效偏慢,高速更偏向跟车行驶。小鹏NGP标定策略相对合理,但偶尔会遇到高精地图缺失,导致NGP退出情况。
在高速封闭道路上, 车辆最多的动作也即是上下匝道,变道超车,辅助驾驶状态下变道超车一定留意后方来车,尤其是向左边快车道变道时,出匝道也需额外留意, 提前给车辆指示,快到出匝道路口,如果车辆还没有完成到最右侧车道动作,果断人工接管,避免错过路口。


总结:
以上是小编根据日常使用辅助驾驶功能的体验, 列举出辅助驾驶潜在失效的场景总结,需要用户格外留意!
从实际体验看,目 前全行业的自动驾驶没有一个真正好用的,最多是在理想工况下解放了部分驾驶精力,但都需要驾驶员时刻关注路面情况,随时准备接管车辆。


往往很多人在理想路况下用过几次后,就变得很信任辅助驾驶系统的能力,这往往就是出问题的开始。
从以上列举的场景, 想必你也大概能够知道现阶段辅助驾驶车辆普遍的能力边界, 当视觉摄像头受到影响,当遇到复杂的交通情况,当遇到突发情况时,辅助驾驶系统不能完全胜任,仍需驾驶员接管人工驾驶。 别把生命交给机器!
划重点:当遇到辅助驾驶系统退出、或行驶方向错误时,请切记先踩刹车,再转动方向盘,不要和车辆争夺方向盘,防止造成车身较大摆动发生危险!


需要特别说明的是, 自动驾驶是汽车变革中最重要的组成成分,目前造车事故的主要原因,一则是各个厂家宣传上有过度营销的成分,二则是普通用户没有真实了解目前辅助驾驶能力边界,过度信任或滥用。
这并不代表发展自动驾驶没有意义,从整体交通事故看,辅助驾驶的紧急刹车和紧急避让已经避免很多事故和伤亡,但新技术总有不成熟的地方, 普通用户唯一要做的是理性正确使用辅助驾驶,让它发挥该有的价值。
希望看到这里的朋友,点赞收藏,转给身边用辅助驾驶功能的朋友,安全第一,以上场景慎用辅助驾驶!
更多智能电动汽车深度价值信息,请关注 @智能电动
