


基于转子磁链定向控制的三相异步电动机

本文简单介绍了三相异步电动机的转子磁链定向控制的基本原理,文章结尾附上Matlab仿真程序链接。
1.三相异步电动机的数学建模
三相异步电动机的数学建模可参考陈伯时教授主编的【电力拖动自动控制系统——运动控制系统】,异步电动机的数学模型由电压方程、磁链方程、转矩方程和运动方程构成。
由于异步电动机经过坐标变换可以等效成直流电动机,且直流电动机的控制策略成熟且简单,所以可通过坐标变换实现三相异步电动机的控制系统。坐标变换的作用是降阶,基于转子磁链定向控制就是降阶后的一种矢量控制系统。
2.基于转子磁链定向控制
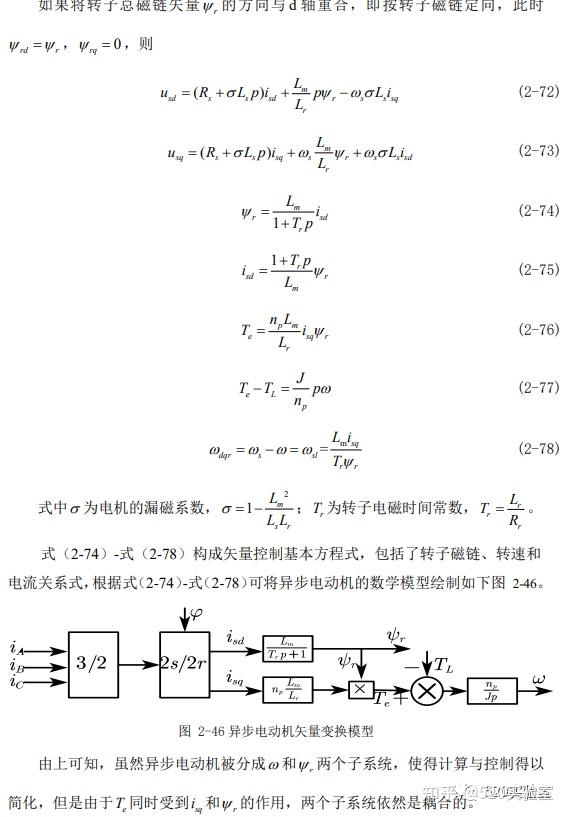
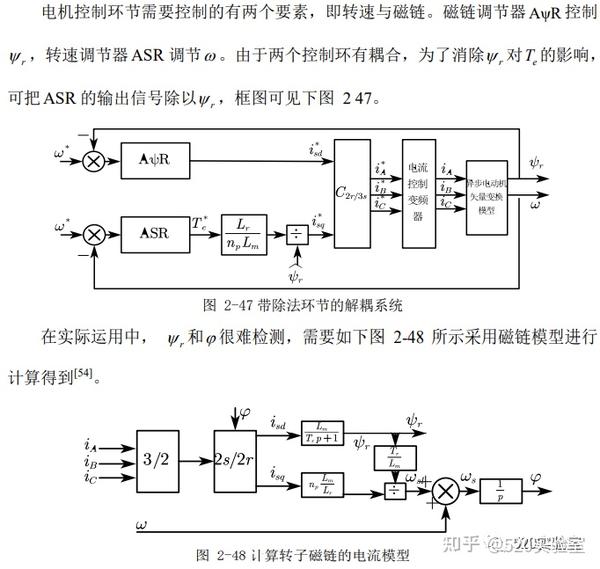
按转子磁链定向的异步电动机数学模型
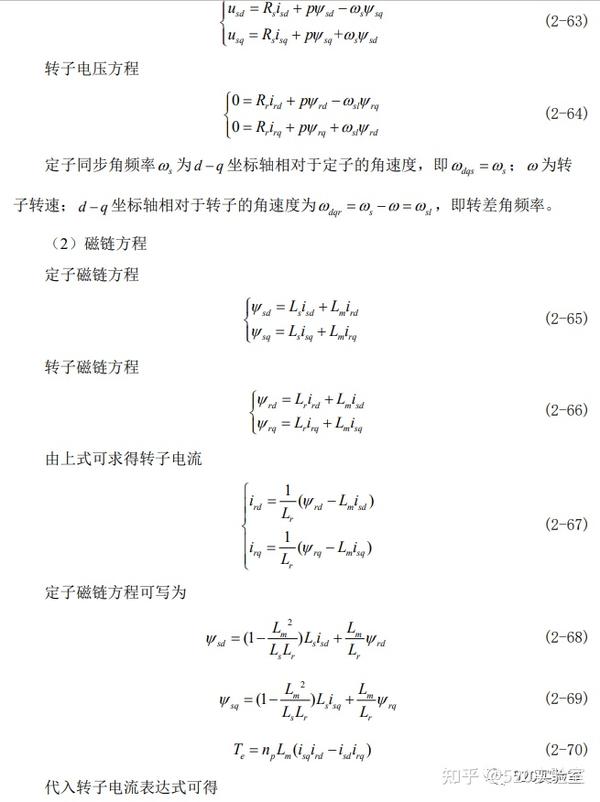
(1)电压方程
定子电压方程





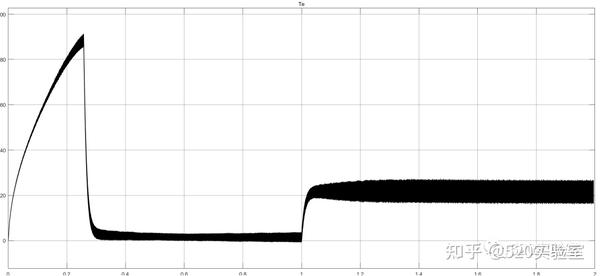
3.三相异步电动机仿真验证
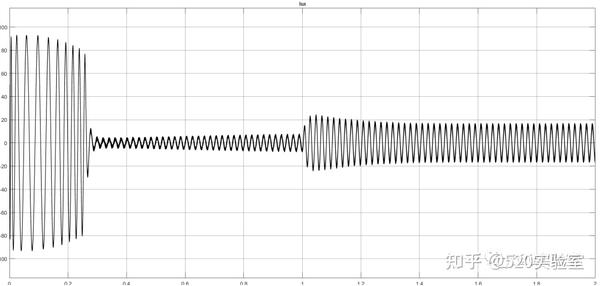
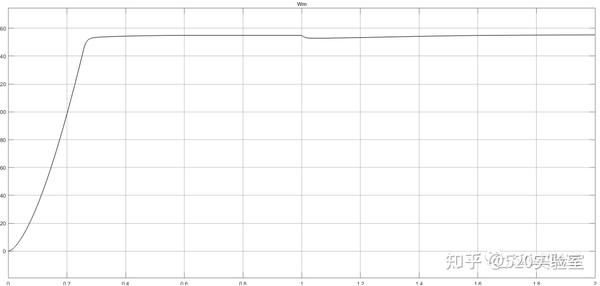
电动机给定转速为155r/min,在t=1s,突加20N.m的负载转矩,电机转速有轻微跌落。在电机控制环节的作用下,转速反馈值与给定值的差值作为转速环的输入信号,通过反馈调节,使得输出电磁转矩增加至 20N.m,从而使电机转速恢复稳定并保持在给定值。电动机的输出转矩波形、定子电流波形和转速波形如下:



Matlab仿真程序百度云链接:520实验室(微信公众号)同名文章结尾附有链接。
欢迎关注微信公众号与B站同名账号(520实验室),来找我玩儿,非常期待和你一起交流与分享。原创不易,你的反馈是对我的最大认可。
