

![[RL] CS285/294: Lecture 8 DQN](data:image/svg+xml;utf8,<svg xmlns='http://www.w3.org/2000/svg'></svg>)
[RL] CS285/294: Lecture 8 DQN

lec7 讲了Q-learning,lec8的目标是能在实践中使用Q-learning,因此进一步讲Deep RL with Q-function。
今天的主要内容如下:
- 在Q-learning中使用深度网络
- 一个更普遍意义的Q-learning 算法 - DQN
- 实际中提升Q-learning的算法-DDQN
- 连续动作空间的Q-learning 方法
online Q-learning的问题
在Lecture 7中我们主要介绍了Q-learning,其实就是只使用critic的actor-critic算法,然后取最合适的动作a。但是Q-learning 尤其是online Q-learning 存在两个问题:
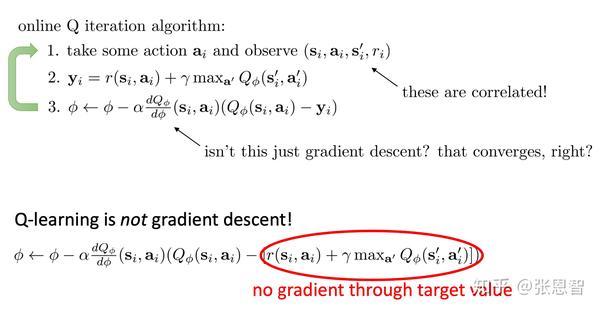
- Q-network 不收敛
在online Q iteration 算法中的第三步,似乎是一个梯度下降的迭代方式,按理说如果是梯度下降只要参数学习率设置合理,总能找到一个局部最优解。但online Q-learning 并不能保证收敛,为什么呢?原因是:
Q-learning的更新方式并不是梯度下降,即使形式上看着像。 我们在说梯度下降时,往往指label是固定的,但是其实这里的 y_i 每次都在变化。当我们的目标是在游走的时候,模型肯定就不会收敛,这也说其实不是梯度下降的原因。
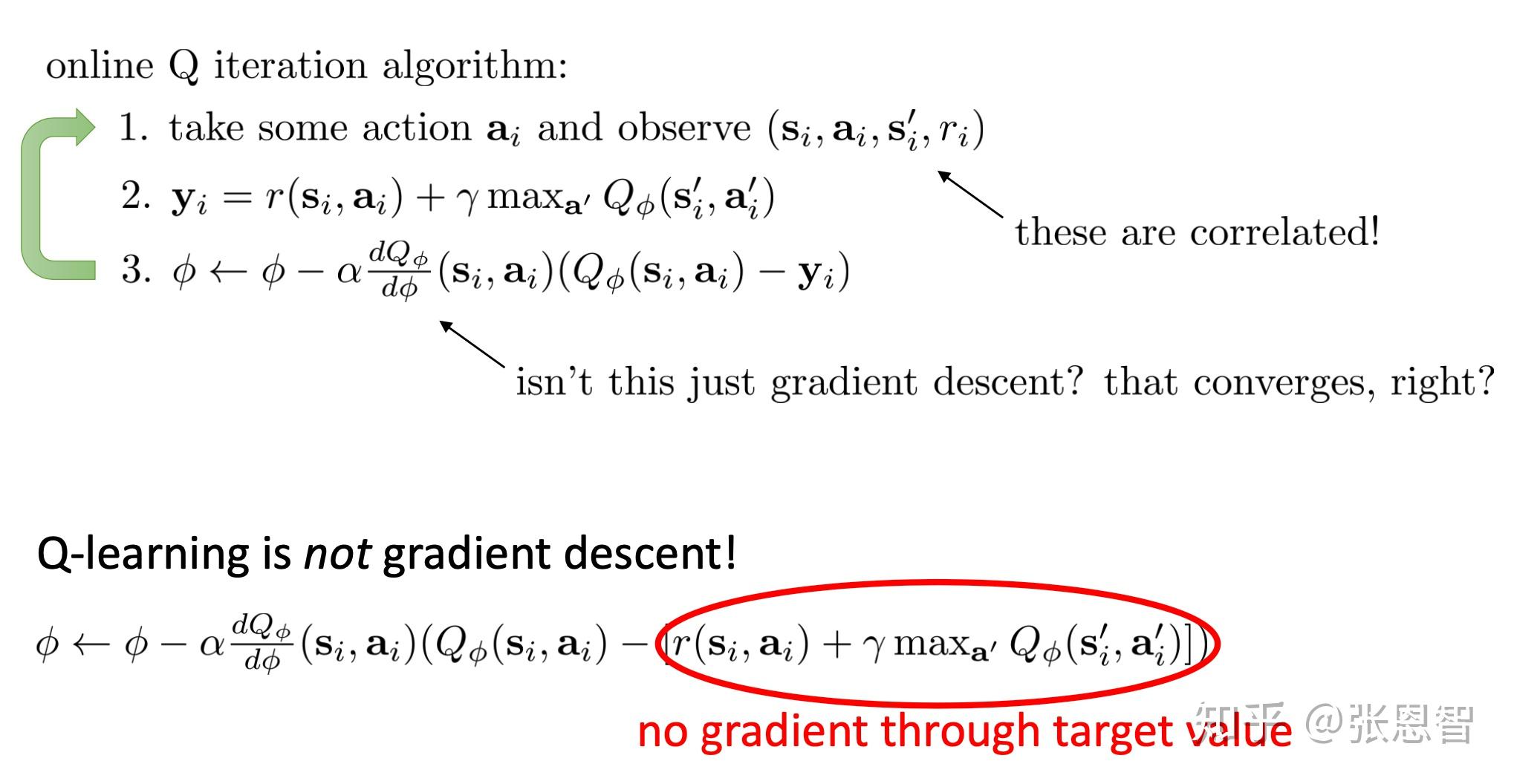
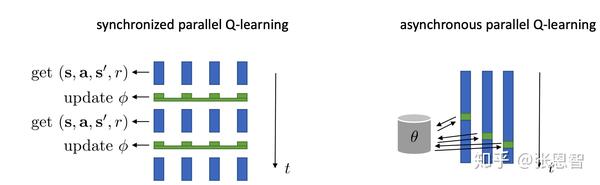
2. online收集的transition数据并不是相互独立的


假设这条曲线是样本的全过程,而online跟新,每次我们都只收集相邻的四个,因此非常容易局部拟合而忽略全局状态。解决这个问题当然可以用actor-critic中的想法,并行跑多个worker:
2.如何解决这两个问题?
首先第二个问题,样本不独立的问题,除了使用并行也很好解决,思路是这样的:
2.1 Replay buffer
我们建立一个buffer,每次从其中随机的取样本进行更新Q-network,这样就能保证(我觉得这样online就变成offline了):
- 随机保证样本独立
- 多样本保证策略梯度稳定


当然为了保持Q-learning的性能,需要不断向buffer中添加新的转移样本,添加的方法可以来自我们当前的Q-learning的policy也可以是其他的policy:
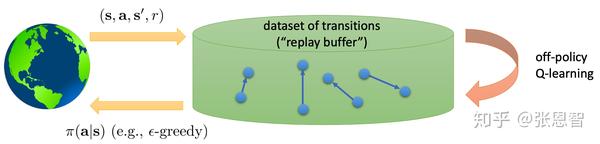
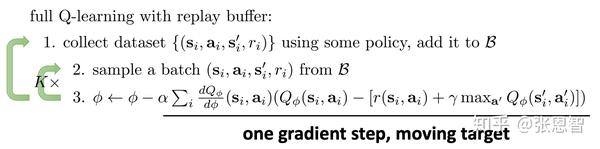
将产生buffer与更新放在一起,就得到了新的算法,叫Q-learning with replay buffer:


对于第一个,lable漂移导致不收敛问题,解决思路如下:
2.2 Target net & Deep Q-learning
不收敛是因为,使用一步梯度并且目标转移,那么我们重新等一下,仿照如下:
我们定义第三步更新是取得全局最优的Q,因此此时Q其实是fix-point在Q-net上的投影,因为最优所以稳定(每次更新都是自己),而 本质上Deep Q-learning之所以收敛是因为深度网络很好的拟合了Qvalue导致fix-point就在或者非常靠近深度网络上 ,虽然我不禁疑问如何保证取到全局最优?还不是梯度下降?但是这给了我们思路是,让 y_i 保持不变,或者一定程度的不变,是更新稳定的必要条件,因此我们引入一个target-net的概念:
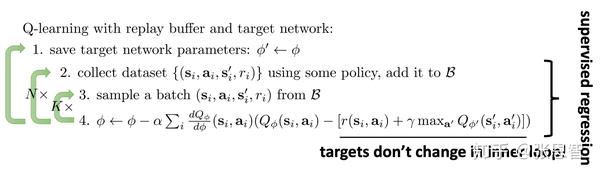
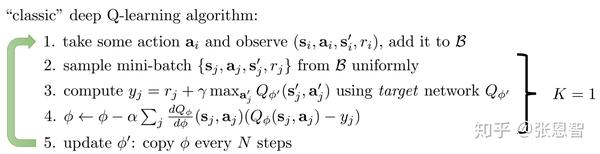
target-net 其实就是旧模型,当前模型的更新被旧模型约束,每隔N次大的更新一下旧模型,这样就能保证在更新当前模型时,label都是固定的,这样就稳定了。其实经典的deep Q-learning 算法就是在 K 取值为1下的情景:
2.3 一些小的改进
N次更新旧网络会有一个延迟问题:
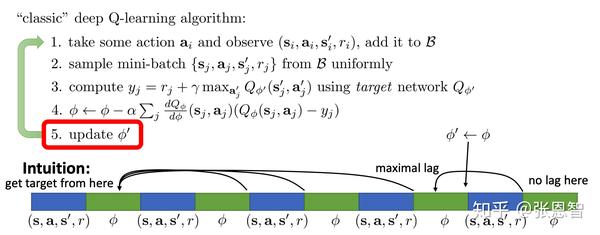
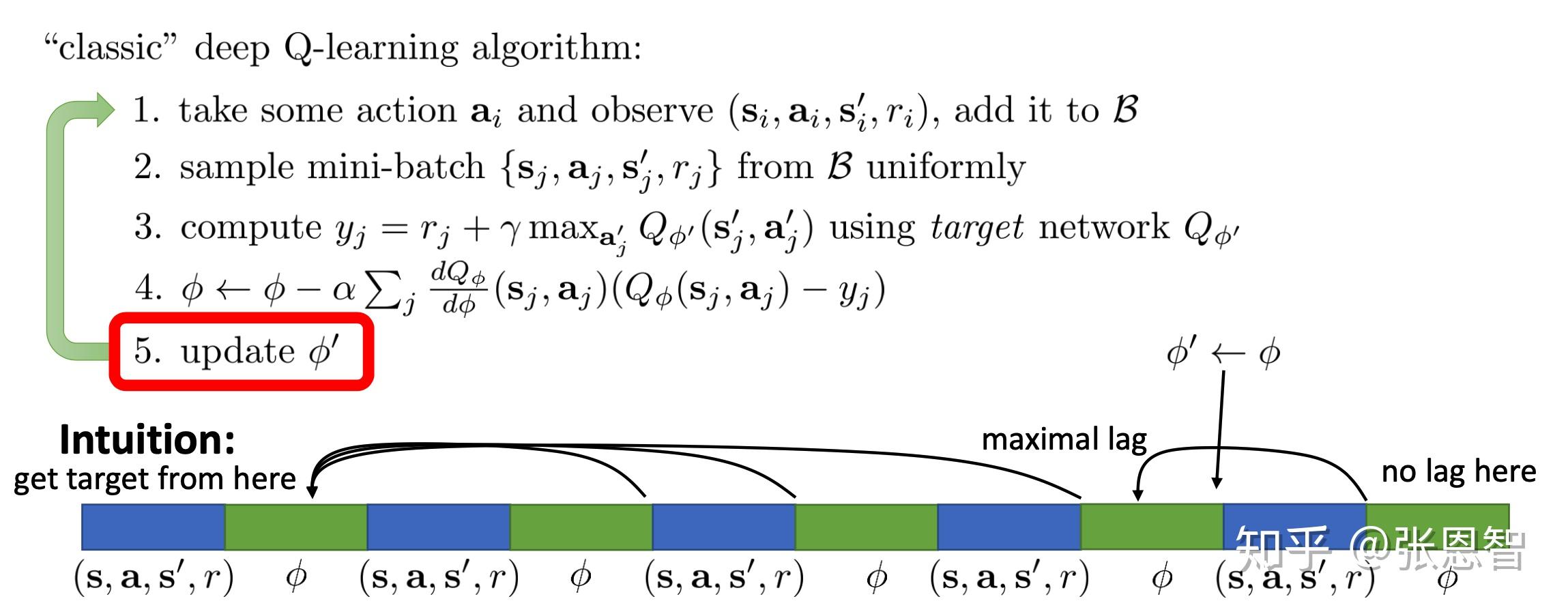
比如你让N取5,那么第一次的 Q_{\phi} 和第五次的 Q_{\phi} 其实差别已经很大,而 Q_{\phi^{\prime}} 却没变,这有些不公平,有一个改进策略是线性分割一下:


2.4 泛Q-learning(general view of Q-learning)
总体而言Q-learning分三个部分,可以用三个进程来并行描述:
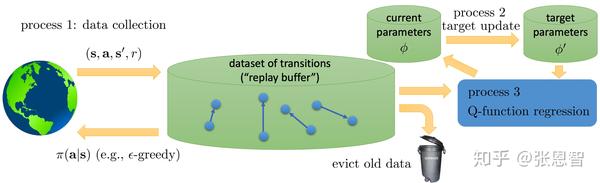
分别是采集数据,更新当前网络(K),更新target-net(N),目前说的的Q-learning只是在这N和K的取值和采集数据的速度上有所不同,或者嵌套不同,比如:
- online Q-learning:这三个速度保持一致,都是1。
- DQN:收集数据和更新当前网络速度一致,进程2比较慢
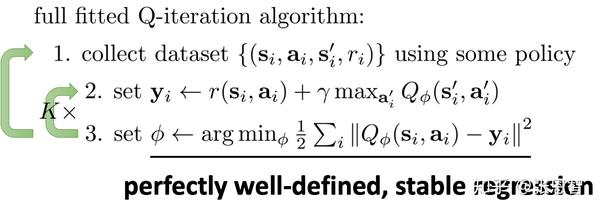
- Fitted Q-iteration:非并行,1套着2,2套着3(套着==loop)
3.Q-learning 的改进
如果要改进Q-learning,首相要问Q-net是否准确?
3.1 Q-net 是否估计的准确?
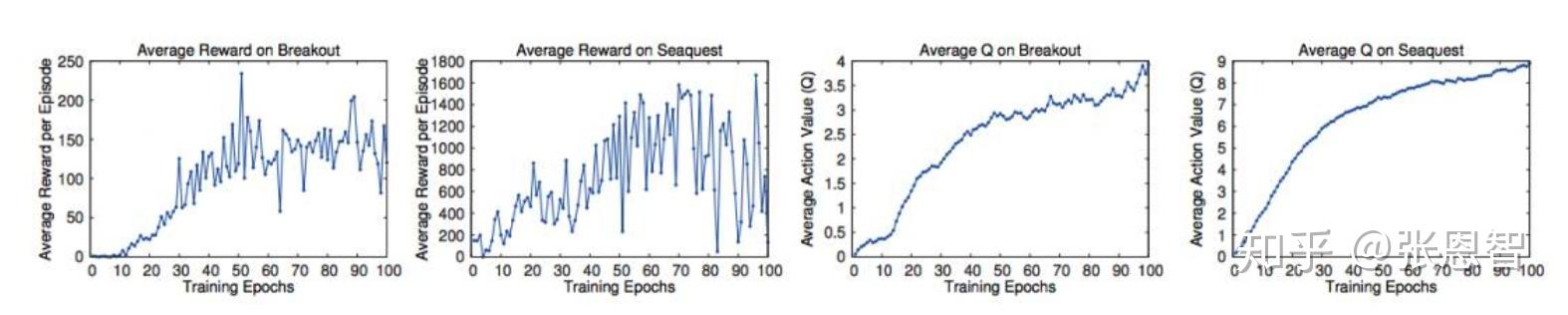
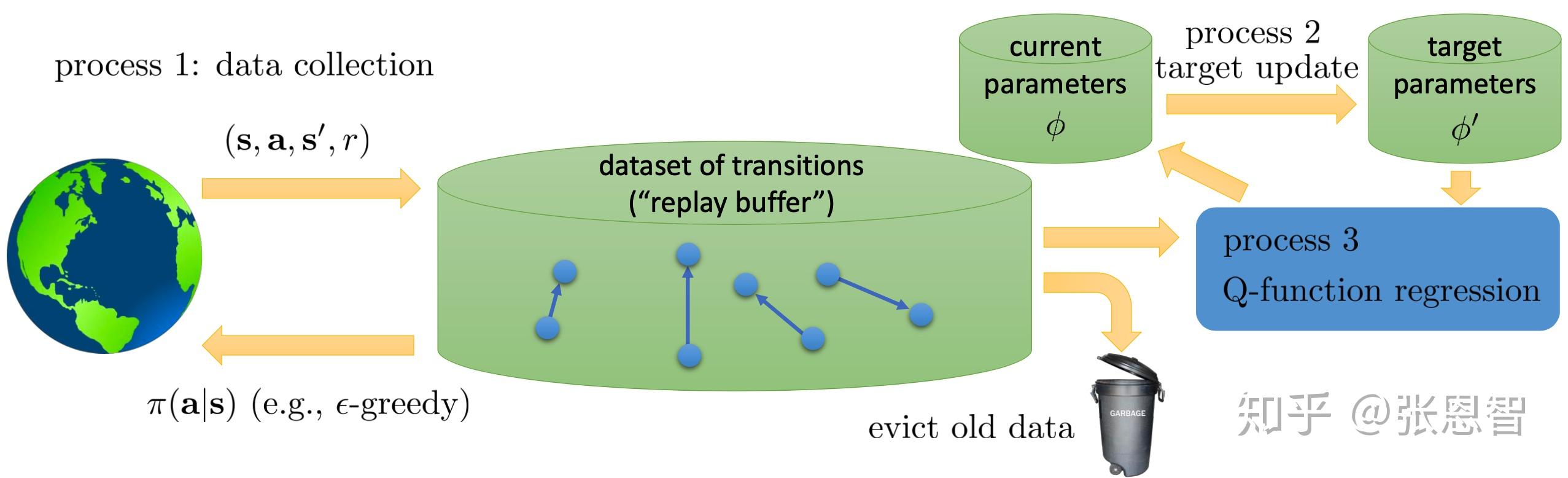
这4张图是Atari的两个游戏,左边2张是真实奖励,右边2张是估计奖励,从趋势上来看至少吻合。但是:
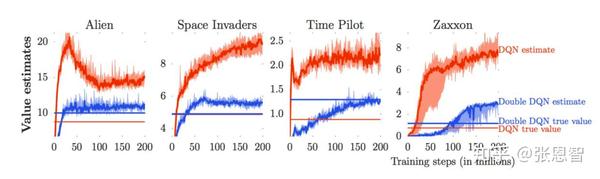
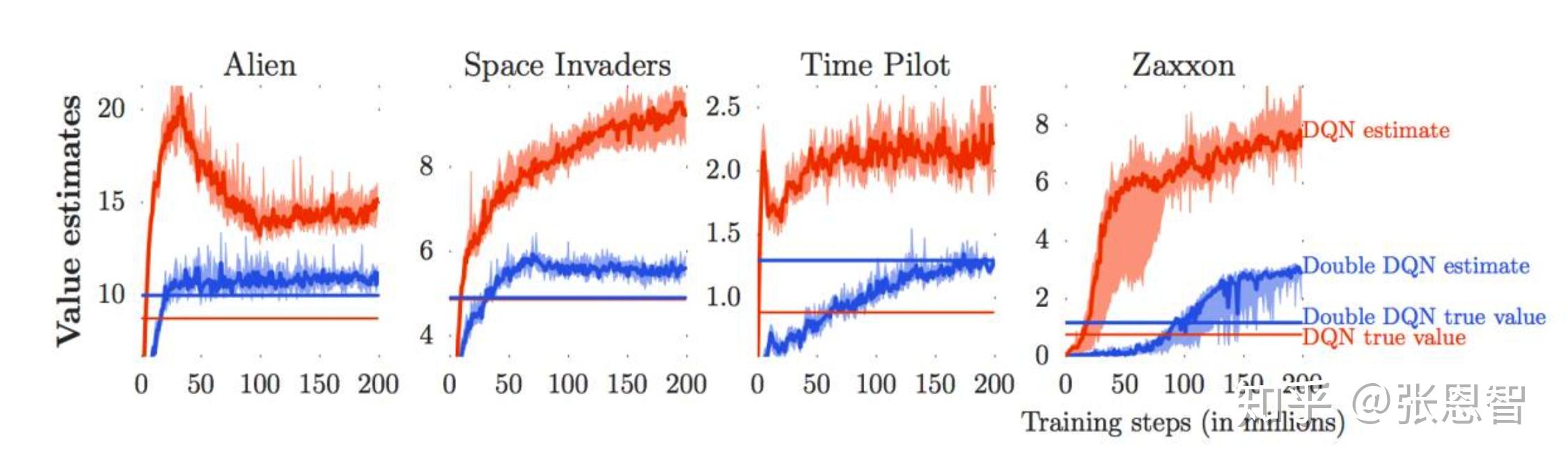
这是四个atari游戏,我们只看红色的线,红色的曲线是Q-net估计的奖励,红色直线是实际的奖励。我们可以看到,Q-net的估计值总是比实际值高很多,这是为什么呢?
3.2 Q-net 高估的一个解释
如果 X_1 和 X_2 是两个随机变量,则有:
E[max(X_1,X_2)]\geq max(E[X_1],E[X_2])
这个说明什么呢?对随机变量先取max会导致均值上移,这就是Q-net变高的直觉解释。
每次Q-net的迭代都是对Q-net在 s 下取使其最大的 a ,而在 s 下的Q-net本身是一个非常崎岖不平的曲线,对其取max无疑会选择过估计的那个动作 a ,并且一次一次的迭代,每次取最大max,我估计Q-net的指也很像是单调递增了。
解决的办法就是double deep Q-learning(DDQN)
3.3 double deep Q learning
DDQN的核心想法是,既然对于同一个网络Q,取action导致误差的value,那么我们干脆把取action和评估reward交给两个net来做。一个提供动作,一个评估Q-value。这样的好处是,选择相对较优的action,同时不因noise的原因,推升value。具体更新方法如下:
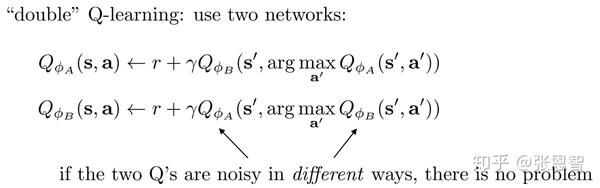
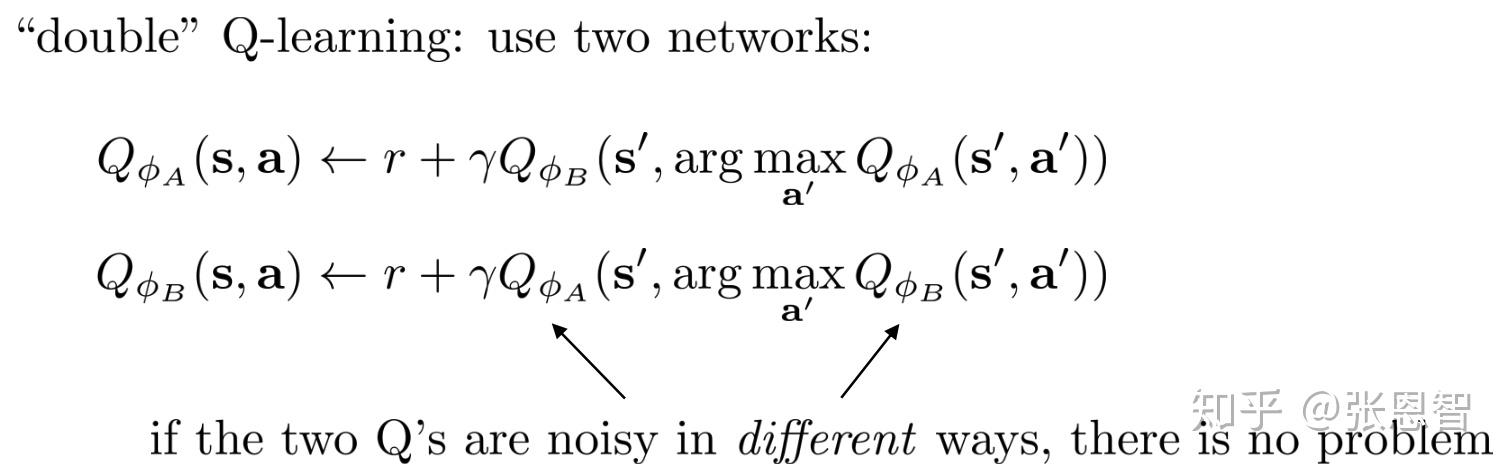
在更新 \phi_A 的时候,通过计算 \phi_A 的argmax来取得action, \phi_{B} 用来评估value。同理,在更新 \phi_B 时,通过计算 \phi_B 的argmax来取得action,而用 \phi_A 来评估value。这样只要两个网络的误差不一致,那么就可以降低DQN的过高估计问题。
in practice
实际使用的时候,只要将我们当前的网络叫做 \phi_A ,target-net叫做 \phi_B ,然后在评估value的时候用 \phi_B 就可以了,如下:


这样感觉还是一个网络结构,参数不一样罢了, 其实说白了 \phi_B 起到了一个稳定器的作用,防止因为argmax导致的误差产生的bias。
3.3 Muti-step returns


再回到我们的Q-learning 的target,target的label由两部分组成,第一部分是当前的奖励,第二部分是Q-net 估计的奖励。我们来问一个问题: 如果Q-net估计的不太准咋办?
如果Q-net估计的不太准,我们应该更关注第一项的准确度,而把第二项推后,如下式子:
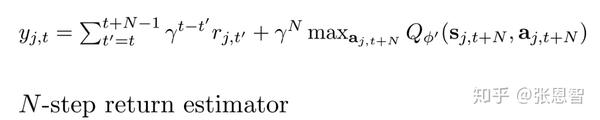

这个target label 分为两个部分,第一部分是N步的真实奖励,第二部分是N步之后的Q估计奖励。这样做的好处是:
- 当Q-net估计不太准的时候,bias更小。因为我们降低了Q-value的权值,而提高了真实奖励的权值。
- 更快。
缺点是,保持正确性需要onpolicy。为什么?因为我们需要知道N次的转移概率,而不只是一次的transition。怎么改善这一点呢?
- 无视。往往效果挺好
- 只选择由N步数据的transition
- 重要性采样
4. Q-learning对于连续的动作
当动作是连续的会有哪些问题:


不好选择动作,因为动作无穷个。解决的方法通常有三种。
4.1 Random sampling


就是均匀离散化,然后假设采样最大值就是全局最大值。好处是可并行,快。坏处是不非常准确。但是可以重采样,提升精度,比如CEM(cross-entropy method)
4.2 easily optimized Q-function


这类想法是,重新构筑一个很好优化Q-function,比如这里提到的NAF(normalized advantage function)。因为,其实此处 \mu_{\phi} 就是大体最优的策略(忽略u估计不准的情况...)所以不用太多的改变算法的同时,效率和Q-net差不多,坏处是,降低了网络的表征能力(这也是经验所得)。
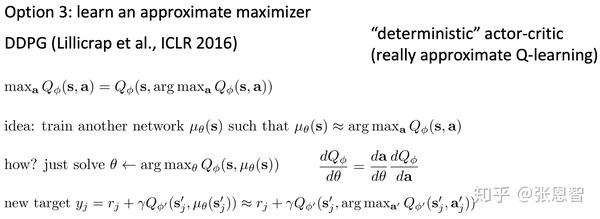
4.3 Approximate maximizer
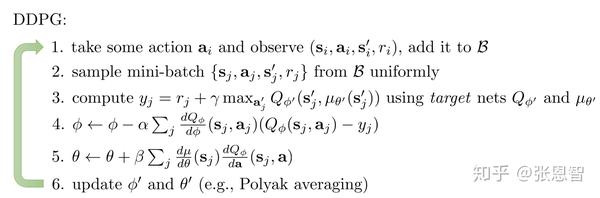
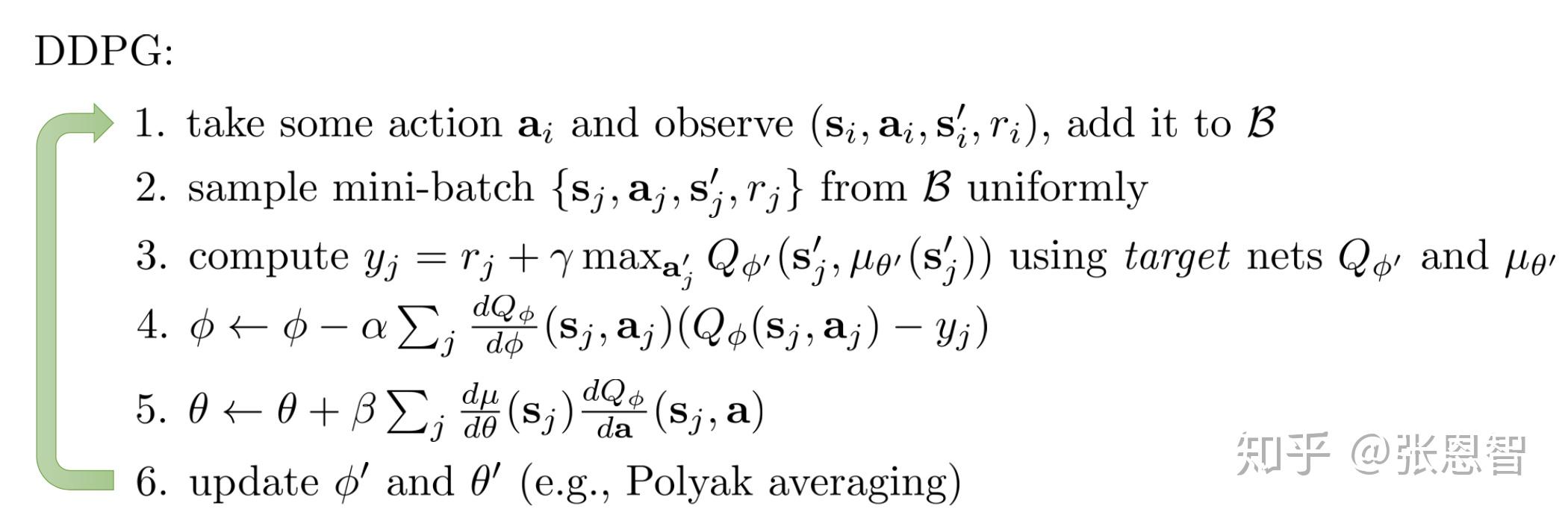
这里有一篇论文主要是这个方法,DDPG (Lillicrap et al., ICLR 2016) 。想法其实不复杂,就是使用一个代理网络,根据状态评估最佳的action。因此又引入一个network,所以此时如果算是target-net(DDQN),和这个代理网络就有三个网络,降低了推理效率,但提高了policy的效率。
更新方法也是向后传递,给出完整的DDPG
以上就是lec8的大体内容,包括DQN和DDQN,以及一些改进方法。
